AKD BASIC User Guide | 6 AKD BASIC Parameters, Operators, Statements
6.11.17 DRV.EMUEZOFFSET
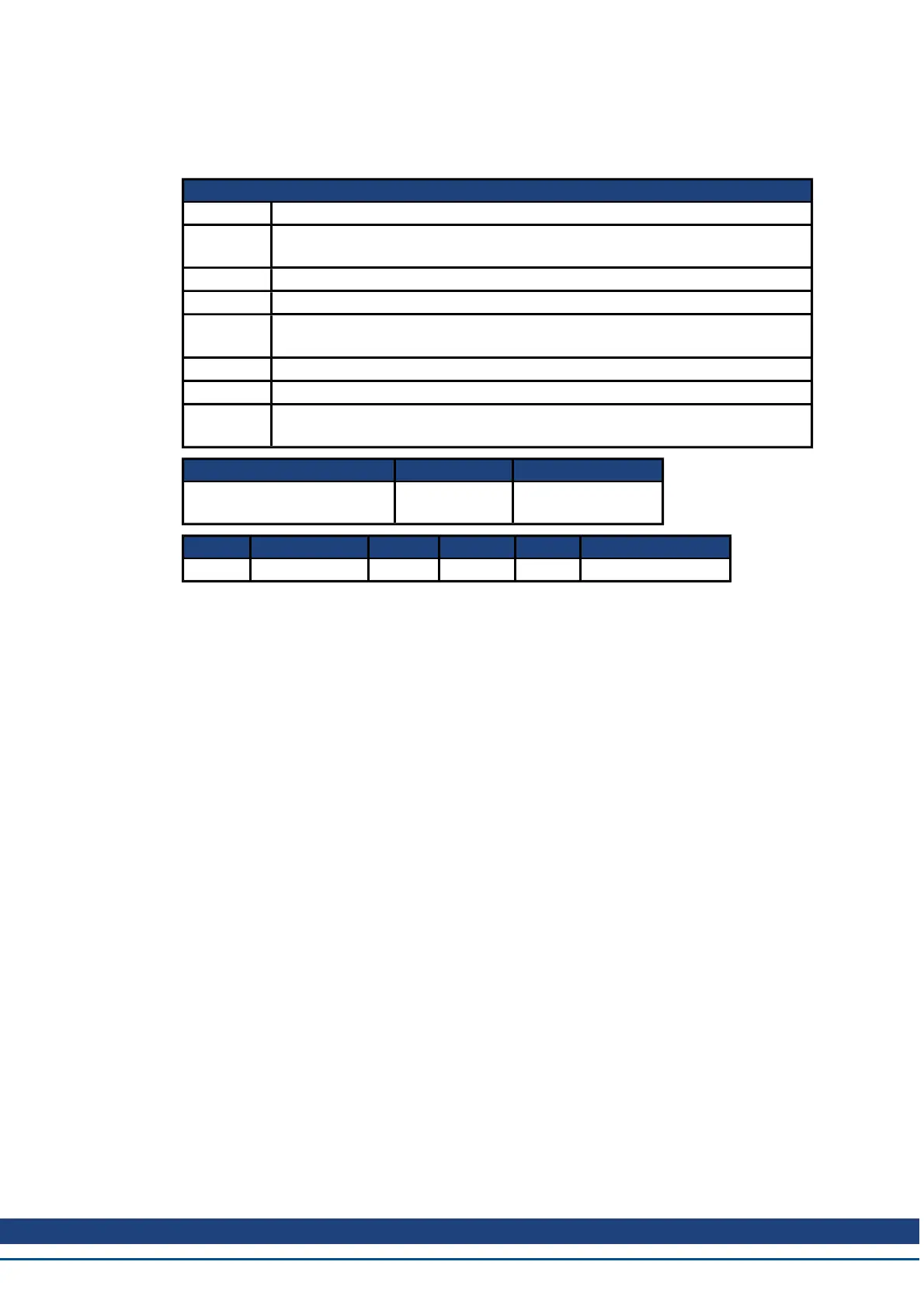
General Information
Type R/W Parameter
Description
Sets the location of the EEO (emulated encoder output) index pulse (when
DRV.EMUEMODE=1).
Units 1/65536 rev
Range 0 to 65535 rev
Default
Value
0 rev
Data Type Integer
See Also DRV.EMUEMODE , DRV.EMUEMTURN
Start Ver-
sion
M_01-00-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE and CAN-
open
3537h/0 M_01-00-00-000
Fieldbus Index/Subindex Is 64 bit? Attributes Signed? Object Start Version
Modbus 252 No 16 bit No M_01-03-00-000
Description
When emulated encoder output (EEO) multiturn is selected (DRV.EMUEMODE =1), this
parameter is used by itself to define the position if the Z pulse within one revolution.When the
primary feedback position (within a revolution) equals this value, an index pulse will output.
Also, if DRV.EMUEMODE=1 then this parameter is used in conjunction with DRV.EMUE-
MTURN.
When the EEO is configured to generate an absolute index pulse (DRV.EMUEMODE is 2, 7 or
9) this parameter and DRV.EMUEZOFFSET define the location of the Z pulse. DRV.EMUE-
MTURN is used to define which turn of the position range the Z pulse is located and DRV.EMU-
EZOFFSET is used to define the position of the Z pulse within one revolution.
Note: If you are using multi-turn or single tune absolute feedback devices the Z pulse from gen-
erated by the EEO will always be aligned with the same mechanical position of the of the pri-
mary feedback position. If you are using an incremental feedback device then the origin of the
primary feedback is not at the same mechanical position each time the drive powers up.
Kollmorgen™ | March 30, 2012 234