AKD BASIC User Guide | 6 AKD BASIC Parameters, Operators, Statements
6.33.16 VL.KBUSFF
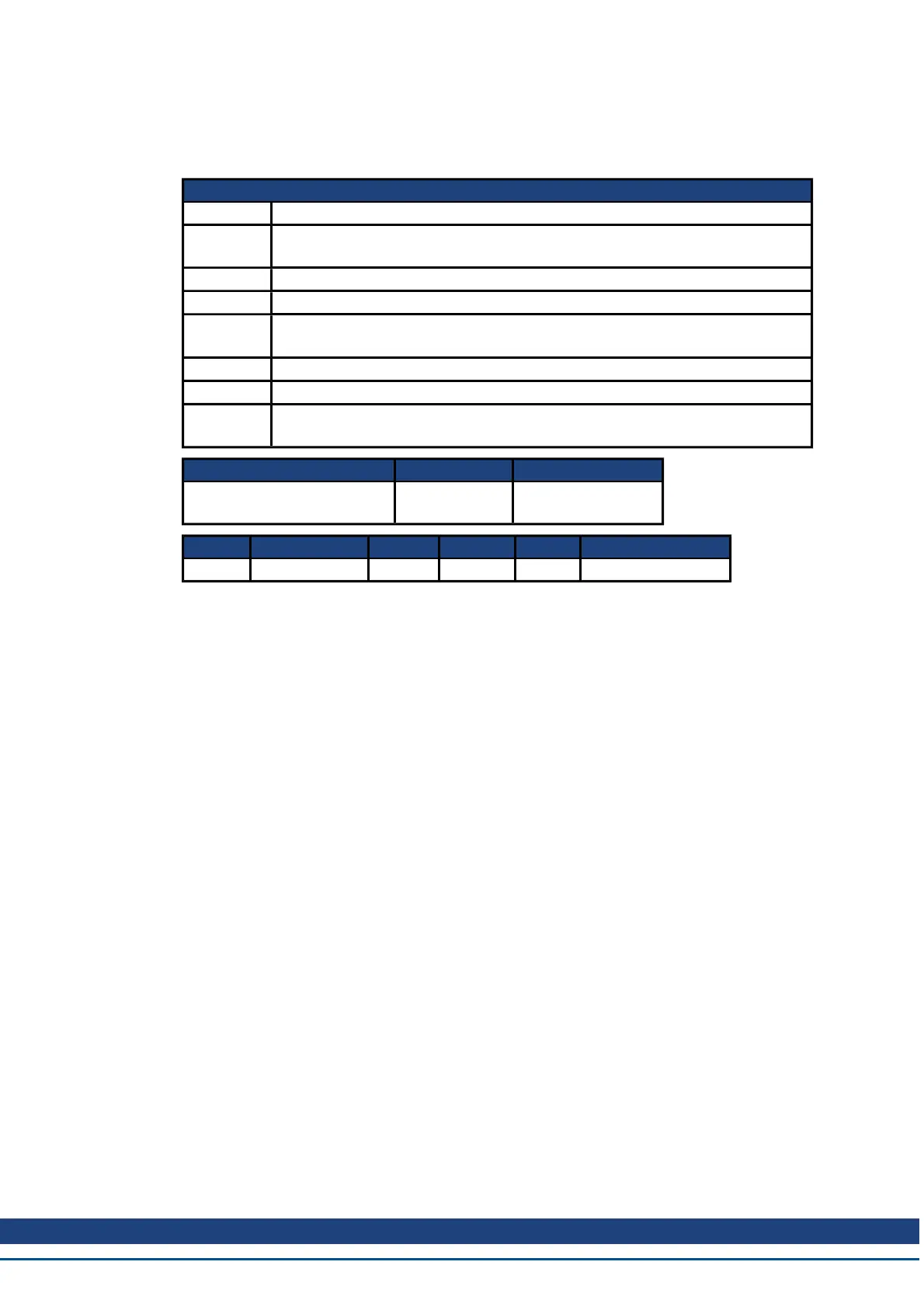
General Information
Type R/W Parameter
Description
Sets the velocity loop acceleration feedforward gain value; active in opmodes 1
(velocity) and 2 (position) only.
Units NA
Range 0.0 to 2.0
Default
Value
0.0
Data Type Float
See Also VL.BUSFF
Start Ver-
sion
M_01-00-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE and CAN-
open
3407h/3 M_01-00-00-000
Fieldbus Index/Subindex Is 64 bit? Attributes Signed? Object Start Version
Modbus 866 No 32 bit No M_01-03-00-000
Description
This parameter sets the gain for the acceleration feedforward (a scaled second derivative of the
position command is added to the velocity command value).
The nominal feedforward value can be multiplied by this gain value.
This will have affect only when using position mode (DRV.OPMODE = 2).
Kollmorgen™ | March 30, 2012 468