AKD BASIC User Guide | 6 AKD BASIC Parameters, Operators, Statements
6.24.14 MOVE.POSCOMMAND
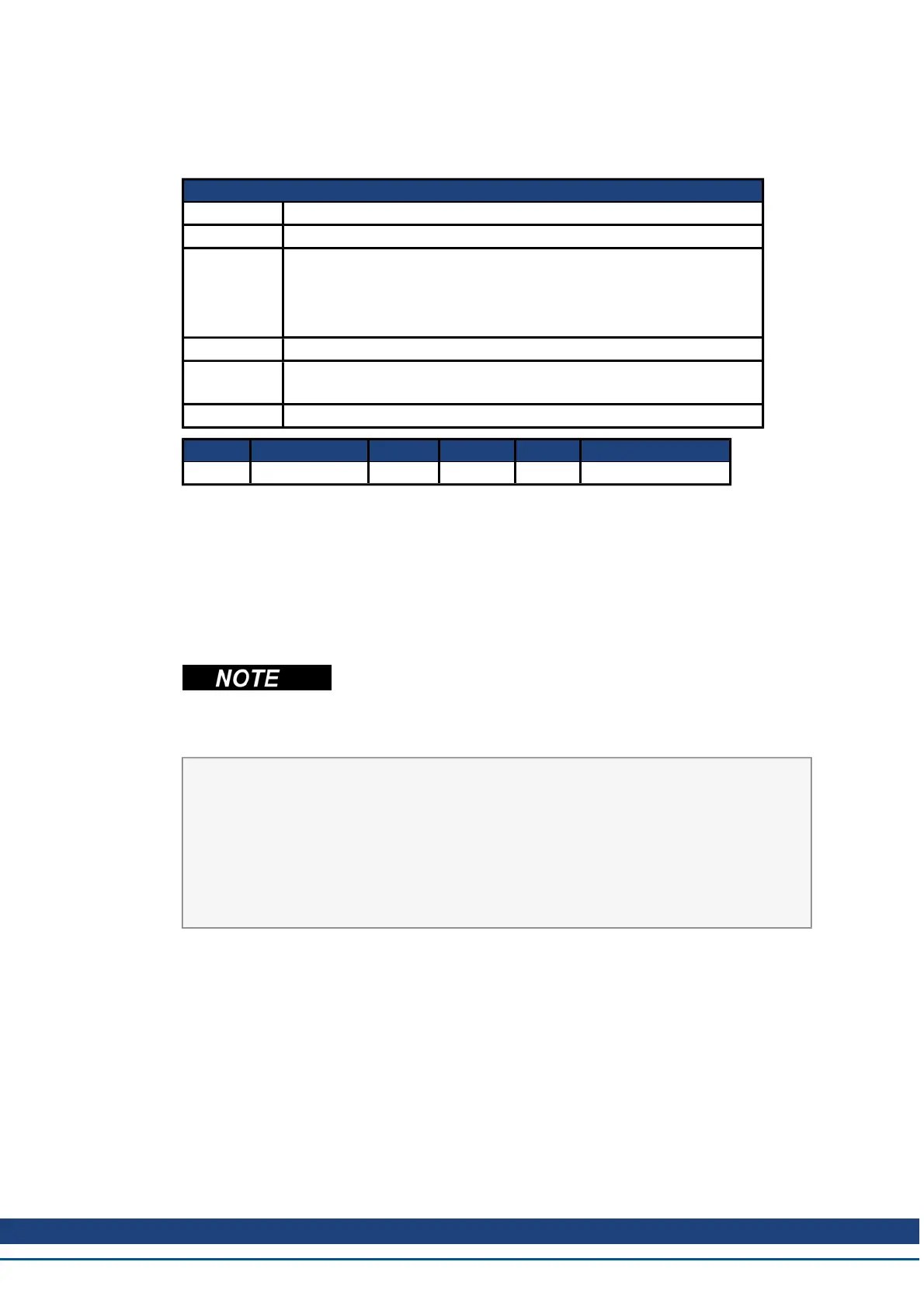
General Information
Type R/W
Description Current Position Command from Trajectory Generator.
Units
Depends on UNIT.PROTARY or UNIT.PLINEAR UNIT.A-
CCLINEAR
Rotary: counts, rad, deg, (custom units), 16-bit counts
Linear: counts, mm, µm, (custom units), 16-bit counts
Range N/A
Default
Value
N/A
Data Type Integer
Fieldbus Index/Subindex Is 64 bit? Attributes Signed? Object Start Version
Modbus 1120 Yes 64 bit Yes M_01-05-11-000
Description
MOVE.POSCOMMAND contains the current position command from the trajectory generator.
The value of MOVE.POSCOMMAND is affected by MOVE.POSMODULO and MOVE.P-
OSPOLARITY.
MOVE.POSCOMMAND can be used to determine the position being commanded. You can
write to MOVE.POSCOMMAND at any time; to establish a new home position (where
MOVE.POSCOMMAND = 0). Writing to MOVE.POSCOMMAND will not affect motor motion.
MOVE parameters are only valid when DRV.OPMODE = 3 and
DRV.CMDSOURCE = 5.
Example
'set electrical home position when DIN1.STATE
goes to 0.
'--------------------------------------
MOVE.DIR = 0 : MOVE.RUNSPEED = 100 : MOVE.GOVEL
When DIN1.STATE = 0, Continue
MOVE.ABORT
While MOVE.MOVING : Wend
MOVE.POSCOMMAND = 0
Kollmorgen™ | March 30, 2012 376