AKD BASIC User Guide | 4 Quick Reference: Parameters, Functions, Operators
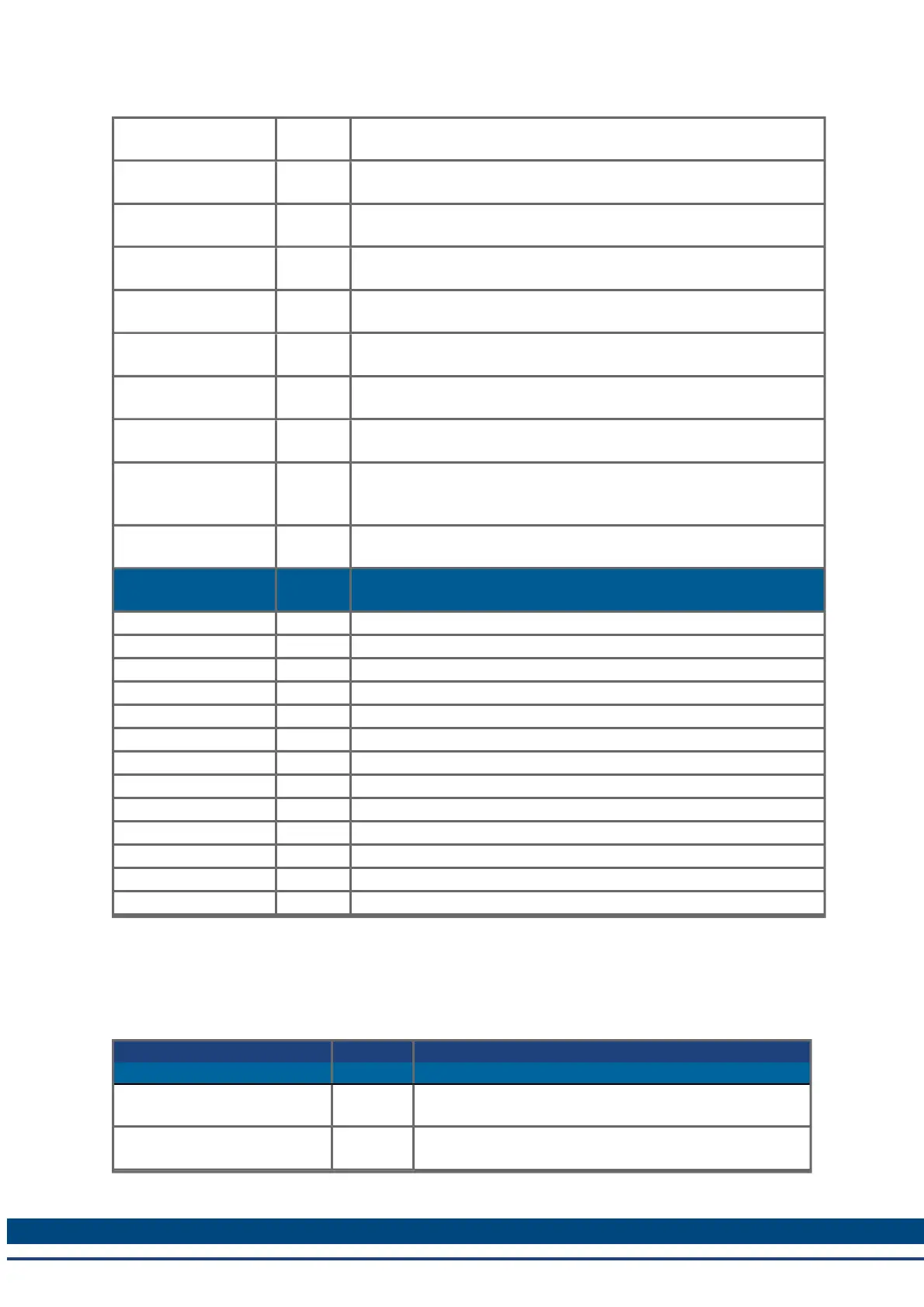
VL.FF R/O Displays the velocity loop overall feedforward value; active in
opmodes 1 (velocity) and 2 (position) only.
VL.GENMODE NV Selects mode of velocity generation (Observer, d/dt); active in
opmodes 1 (velocity) and 2 (position) only.
VL.KBUSFF R/W Sets the velocity loop acceleration feedforward gain value; active in
opmodes 1 (velocity) and 2 (position) only.
VL.KI NV Sets the velocity loop integral gain for the PI controller; active in
opmodes 1 (velocity) and 2 (position) only.
VL.KP NV Sets velocity loop proportional gain for the PI controller; active in
opmodes 1 (velocity) and 2 (position) only.
VL.KVFF R/W Sets the velocity loop velocity feedforward gain value; active in
opmodes 1 (velocity) and 2 (position) only.
VL.LIMITN NV Sets the velocity lower limit; active in opmodes 1 (velocity) and 2 (posi-
tion) only.
VL.LIMITP NV Sets the velocity high limit; active in opmodes 1 (velocity) and 2 (posi-
tion) only.
VL.LMJR R/W Sets the ratio of the estimated load moment of inertia relative to the
motor moment of inertia; active in opmodes 1 (velocity) and 2 (posi-
tion) only.
VL.THRESH NV Sets the over speed fault value; active in opmodes 1 (velocity) and 2
(position) only.
Wake and Shake
(WS)
WS.ARM Command Sets wake and shake to start at the next drive enable.
WS.DISARM Command Cancels ARM requests and resets wake and shake to the IDLE state.
WS.DISTMAX R/W Sets maximum movement allowed for wake and shake.
WS.DISTMIN R/W Sets the minimum movement required for wake and shake.
WS.IMAX R/W Sets maximum current used for wake and shake.
WS.MODE R/W Sets the method used for wake and shake.
WS.NUMLOOPS R/W Sets the number of repetitions for wake and shake.
WS.STATE R/O Reads wake and shake status
WS.T R/W Sets wake and shake current-vector appliance time
WS.TDELAY1 NV Delay for wake and shake timing
WS.TDELAY2 NV Sets the delay for wake and shake timing.
WS.TDELAY3 NV Sets the delay for wake and shake between loops in mode 0.
WS.VTHRESH NV Defines the maximum allowed velocity for Wake & Shake
4.2 AKDBASICParameters and Commands
The following table lists parameters, commands, functions, and operators unique to AKD BASIC. For
detailed descriptions of each parameter click the links below or visit the AKD BASIC Parameters chapter
of the AKD BASIC User Manual.
Parameter Type Description
Additional Statements
$Include Statement The $Include statement allows you to textually include mul-
tiple separate files in a single source file.
Alias Statement Allows you to define your own names for system
resources, such as Input or Output pins.
55 Kollmorgen™ | March 30, 2012