AKD BASIC User Guide | 6 AKD BASIC Parameters, Operators, Statements
6.24.1 MOVE.ABORT
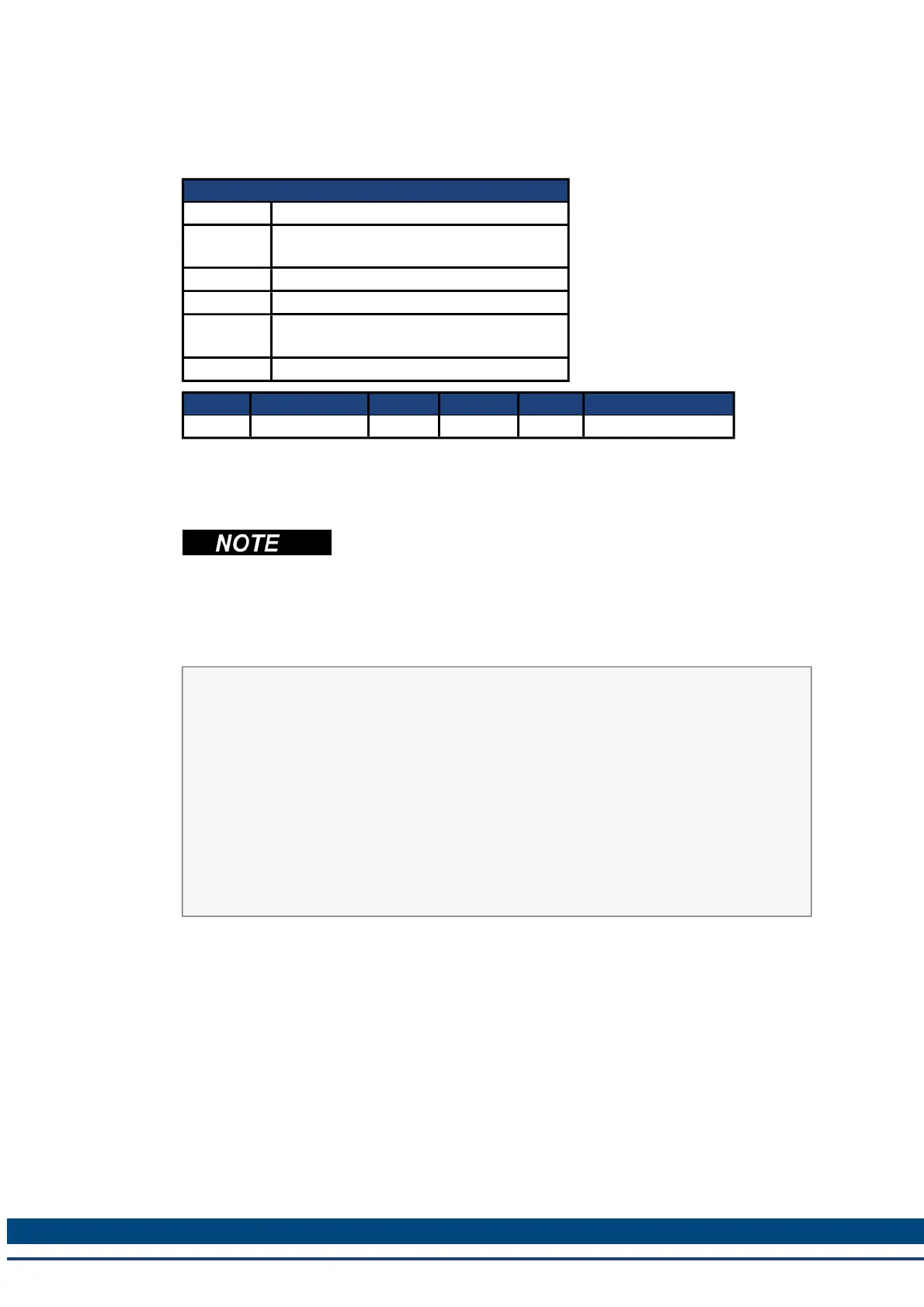
General Information
Type Command
Description
MOVE.ABORT stops motor motion and
allows continued program execution.
Units N/A
Range N/A
Default
Value
N/A
Data Type N/A
Fieldbus Index/Subindex Is 64 bit? Attributes Signed? Object Start Version
Modbus 1144 No Command No M_01-05-11-000
Description
MOVE.ABORT stops motor motion and allows continued program execution. Deceleration is
determined by CS.DEC.
MOVE parameters are only valid when DRV.OPMODE = 3 and
DRV.CMDSOURCE = 5.
Example
This program segment commands the motor at constant velocity until input 1 goes to a logic 0.
Then, the motor is commanded to stop.
MOVE.ACC = 5000
‘Set acceleration rate equal to 5,000 rpm/sec
CS.DEC = 10000
'Set controlled stop deceleration rate to
10,000 rpm/sec
MOVE.RUNSPEED = 120
‘Set Run speed equal to 120 rpm
MOVE.GOVEL
When DIN2.STATE = 0, MOVE.ABORT
'Motor decelerates to a stop at CS.DEC (10,000
rpm/sec)
Print “Move Aborted!”
Related Topics
"Stop" (=> S. 117) | Statement Table | CS.DEC
361 Kollmorgen™ | March 30, 2012