AKD BASIC User Guide | 3 AKDBASICLanguage
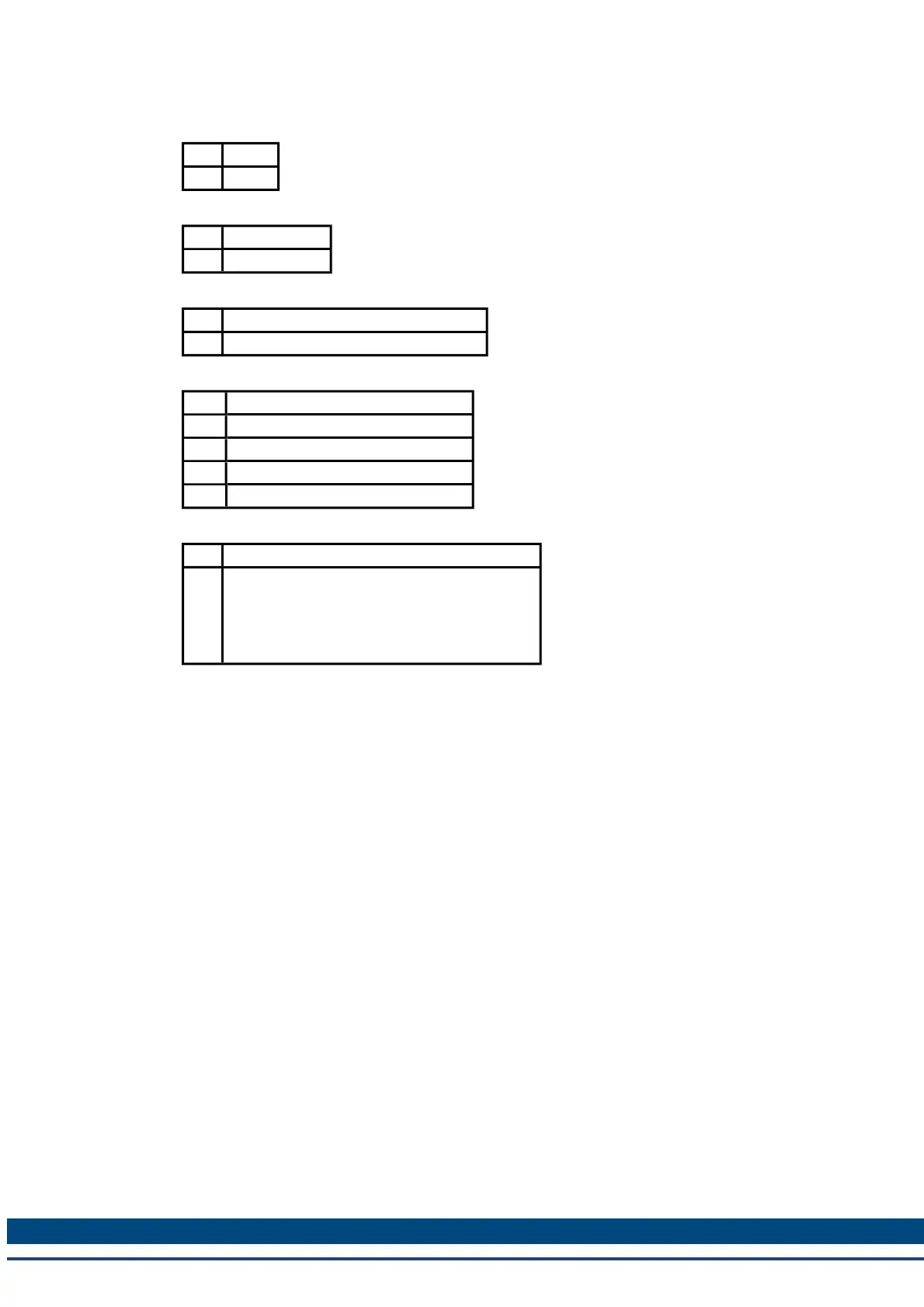
MODBUS.DRV
Bit 0 Stop
Bit 1 Enable
MODBUS.MOTOR
Bit 0 Has Brake
Bit 1 Brake Release
MODBUS.HOME
Bit 0 Start Homing
Bit 1 Set (current position as home position)
MODBUS.MT
Bit 0 Clear (clears motion task MT.NUM)
Bit 1 Continue
Bit 2 Load (load motion task MT.NUM)
Bit 3 Set
Bit 4 Move (start move of MT.NUM)
MODBUS.SM
Bit 0 One Direction (sets SM.MODE to either 0 or 1)
Bit 1
Start Move:
Edge triggered
0 → 1 : Start motion (execution of SM.MOVE)
1 → 0 : Stop motion (execution of DRV.STOP)
3.10.7 ModBus Dynamic Mapping
For information on Modbus Dynamic Mapping visit Modbus Dynamic Mapping under Fieldbus
Manuals.
3.11 Cam Profiling
In the AKD, a cam is a cyclic, generally non-linear relationship between master encoder posi-
tion and slave (motor) position. The relationship between slave and master counts is no longer
a constant ratio, but changes as a function of master counts. As in electronic gearing, once a
cam is active, the program no longer needs to do anything special to maintain it - the motion pro-
file is repeated indefinitely until the cam is deactivated.
In camming terminology, a master is typically an external encoder. The encoder is wired into
the AKD BASIC encoder input port on X9. It is also possible to use the AKD BASIC’s virtual
(internal) encoder.
3.11.1 Procedure
To use a cam profile on the AKD BASIC, you must:
1. Create the cam profile (CAM.CREATE).
2. Activate the cam profile (CAM.ACTIVATE).
3.11.2 Related Variables
CAM.MASTER: Specifies the source of the input to the cam table for cam profiling.
43 Kollmorgen™ | March 30, 2012