AKD BASIC User Guide | 6 AKD BASIC Parameters, Operators, Statements
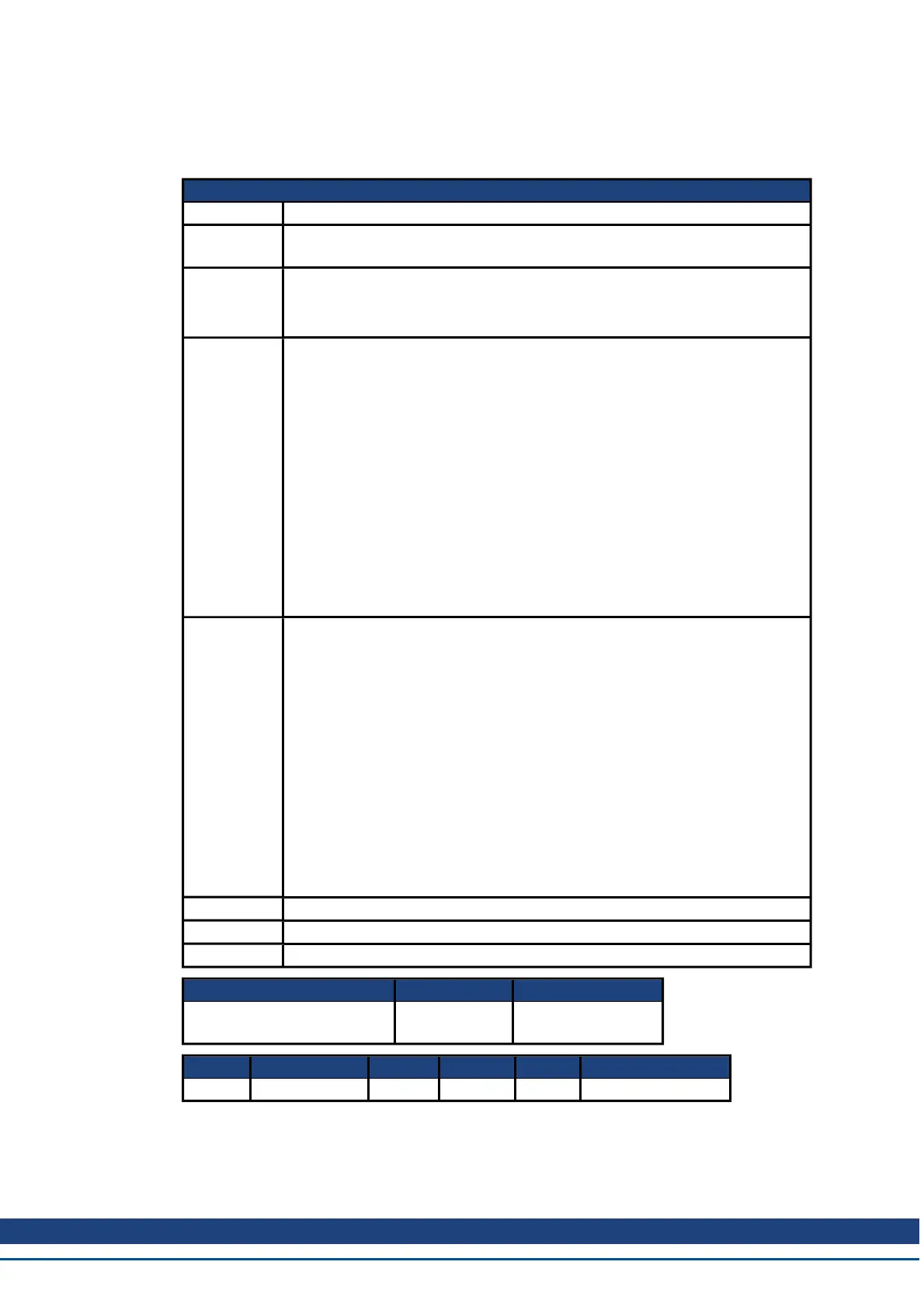
6.25.9 PL.INTOUTMAX
General Information
Type NV Parameter
Description
Limits the output of the position loop integrator by setting the output sat-
uration.
Units
Depends on UNIT.PROTARY or UNIT.PLINEAR
Rotary: counts, rad, deg, (custom units), 16-bit counts
Linear: counts, mm, µm, (custom units), 16-bit counts
Range
Rotary:
0.000 to 18,446,744,073,709.000 counts
0.000 to 26,986.052 rad
0.000 to 1,546,188.288 deg
0.000 to 21,474.836 (custom units)
0.000 to 281,474,976.710 counts16 bit
Linear:
0.000 to 18,446,744,073,709.000 counts
0.000 to 4,294.968*MOTOR.PITCH mm
0.000 to 4,294,967.296*MOTOR.PITCH µm
0.000 to 21,474.836 (custom units)
0.000 to 281,474,976.710 16-bit counts
Default
Value
Rotary:
3,999,989,760.000 counts
5.852 rad
335.275 deg
4.657 (custom units)
61,035.000 16-bit counts
Linear:
3,999,989,760.000 counts
0MOTOR.PITCH mm
9MOTOR.PITCH µm
4.657 (custom units)
61,035.000 16-bit counts
Data Type Float
See Also PL.INTINMAX
Start Version M_01-00-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE and CAN-
open
3481h/2 M_01-00-00-000
Fieldbus Index/Subindex Is 64 bit? Attributes Signed? Object Start Version
Modbus 598 Yes 64 bit No M_01-03-00-000
Description
PL.INTOUTMAX limits the output of the position loop integrator by setting the output sat-
uration.
Kollmorgen™ | March 30, 2012 394