AKD BASIC User Guide | 6 AKD BASIC Parameters, Operators, Statements
6.25.2 PL.ERR
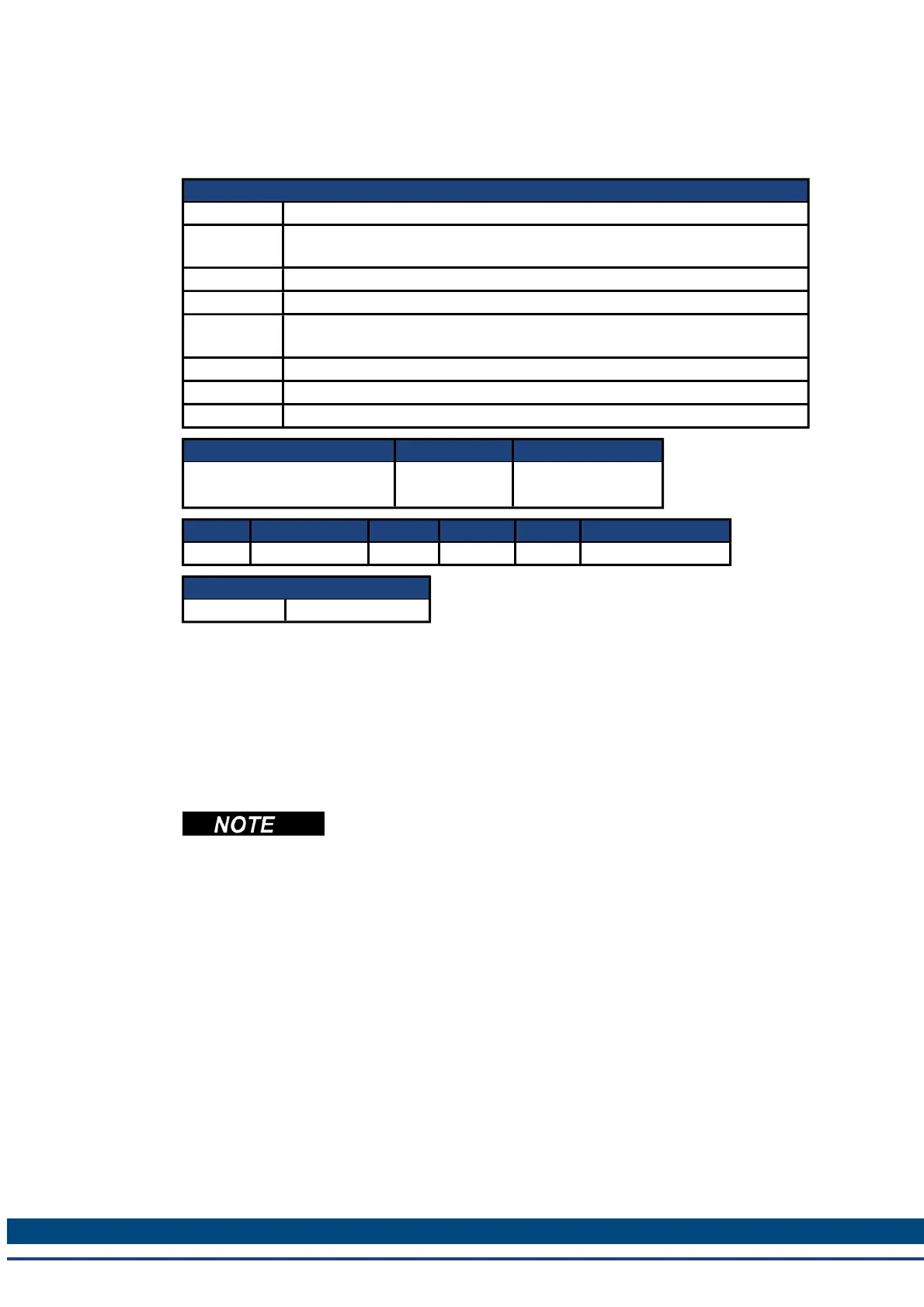
General Information
Type R/O Parameter
Description
Reads the position error present when the drive is controlling the position
loop.
Units counts,rad, deg, (custom units)
Range N/A
Default
Value
N/A
Data Type Float
See Also PL.FB
Start Version M_01-00-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE and CAN-
open
35C5h/0
60F4h/0
M_01-00-00-000
Fieldbus Index/Subindex Is 64 bit? Attributes Signed? Object Start Version
Modbus 574 Yes 64 bit No M_01-03-00-000
AKD BASIC Information
Data Type Integer
Description
PL.ERR reads the position error present when the drive is controlling the position loop.
PL.ERRis the difference between the actual position of the motor shaft(PL.FB ) and the com-
manded position of the drive(PL.CMD ). If the drive is not in the position operating mode
(DRV.OPMODE = 2), then the PL.ERR value is not generated by the drive and this parameter
is readas 0.
AKD BASIC Notes
When you enable the position error interrupt (by setting INTR.PL.ERR = 1), the
Position Error fault is disabled. In situations where this fault would have occurred,
a position error interrupt is generated instead.
Related Topics
PL.ERRFTHRESH | PL.ERRMODE | PL.ERRWTHRESH
383 Kollmorgen™ | March 30, 2012