AKD BASIC User Guide | 6 AKD BASIC Parameters, Operators, Statements
6.33.18 VL.KP
General Information
Type NV Parameter
Description
Sets velocity loop proportional gain for the PI controller; active in opmodes 1
(velocity) and 2 (position) only.
Units A/(rad/sec)
Range 0.001 to 2,147,483.008
Default
Value
1
Data Type Float
See Also VL.KI
Start Ver-
sion
M_01-00-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE and CAN-
open
3548h/0 M_01-00-00-000
Fieldbus Index/Subindex Is 64 bit? Attributes Signed? Object Start Version
Modbus 872 No 32 bit No M_01-03-00-000
Description
VL.KP sets the proportional gain of the velocity loop.
The idealized velocity loop bandwidth in Hz is:
Rotary motor:
Bandwidth (Hz) = VL.KP *K
t
/ (2π *J
m
)
Where:
K
t
= motor torque constant, in units of Nm/Arms
J
m
= motor inertia, in units of kg*m²
Linear motor:
Bandwidth (Hz) = VL.KP * K
t
/ (Motor Pitch (mm) * J
m
)
Where:
K
t
= motor torque constant, in units of Nm/Arms
J
m
= motor inertia, in units of kg
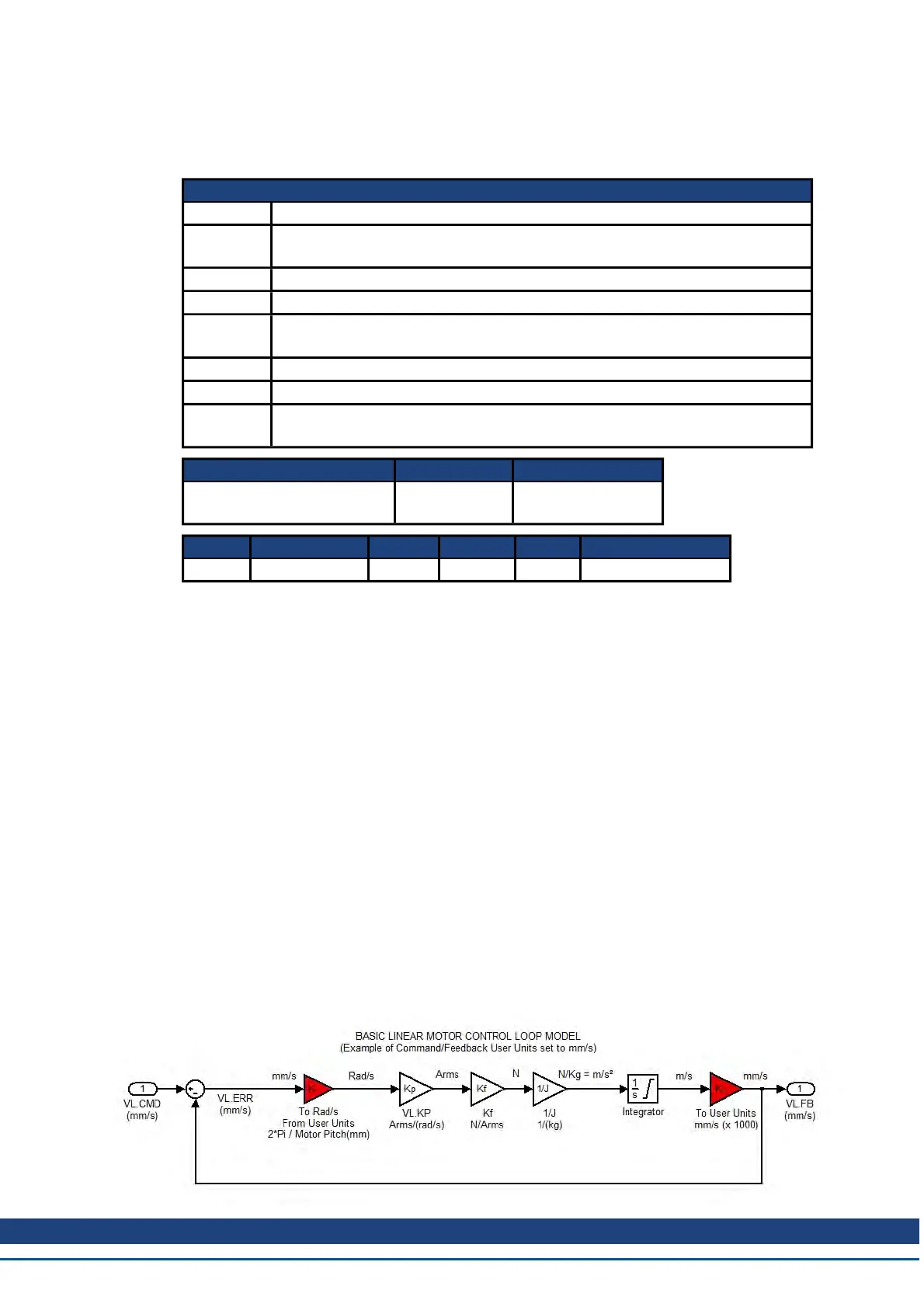
The drive uses the same control loop for both linear and rotary motors. VL.KP units are in Arms
/(rad/s). If you want to tune in units of Arms/(mm/s), then you must manually convert the units.
The diagram below shows how linear motors are implemented at the control loop level.
Kollmorgen™ | March 30, 2012 470