3 Teaching
3.9 Other Job-editing Functions
3-72
149235-1CD
RE-CSO-A031
XYZ Type
About “<TYPE>”
• It is not necessary to set a type if the position variable is to be used for parallel shift
operations.
• When the position variable is used with a move instruction such as “MOVJ P001,” it
is necessary to set a type. For details on types, refer to "Manipulator Types".
Current Position Window (XYZ) shows the current setting of a type.
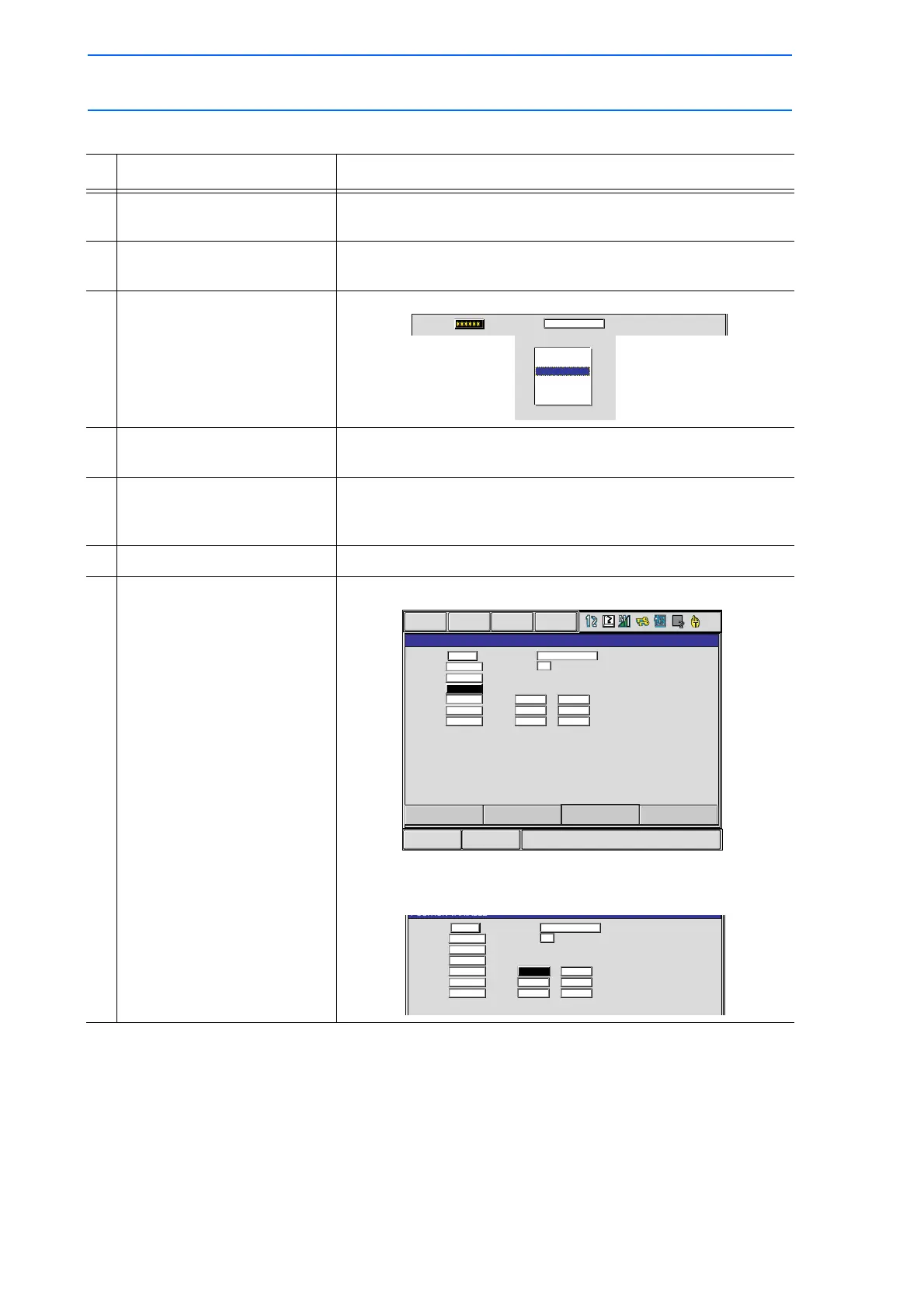
Operation Explanation
1 Select {VARIABLE} under the
main menu.
2 Select desired position
variable type.
3 Select the variable data type. The selection dialog box appears.
4 Select desired coordinates
except PULSE.
5 Move the cursor to desired
data to be input and press
[SELECT].
6 Input the value.
7 Press [ENTER]. The value is set in the cursor position.
Setting of “<TYPE>”
Each time [SELECT] is pressed when the cursor is on the setting
data in the input buffer line, the settings alternate.
PULSE
BASE
ROBOT
USER
TOOL
MASTER TOOL
Short CutMain Menu
POSITION VARIABLE
NAME
TOOL: 00
#P000
R1:
ROBOT
330.000
0.000
-10.000
0.00
0.00
0.00
X
Y
Z
Rx
Ry
Rz
<TYPE>
FRONT S<180
UP R<180
FLIP T<180
DATA
EDIT DISPLAY
UTILITY
PAGE
POSITION VARIABLE
NAME
TOOL: 00
#P000
R1:
ROBOT
330.000
0.000
-10.000
0.00
0.00
0.00
X
Y
Z
Rx
Ry
Rz
<TYPE>
REAR S<180
UP R<180
FLIP T<180

 Loading...
Loading...














