6 Convenient Functions
6.2 Parallel Shift Function
6-6
149235-1CD
RE-CSO-A031
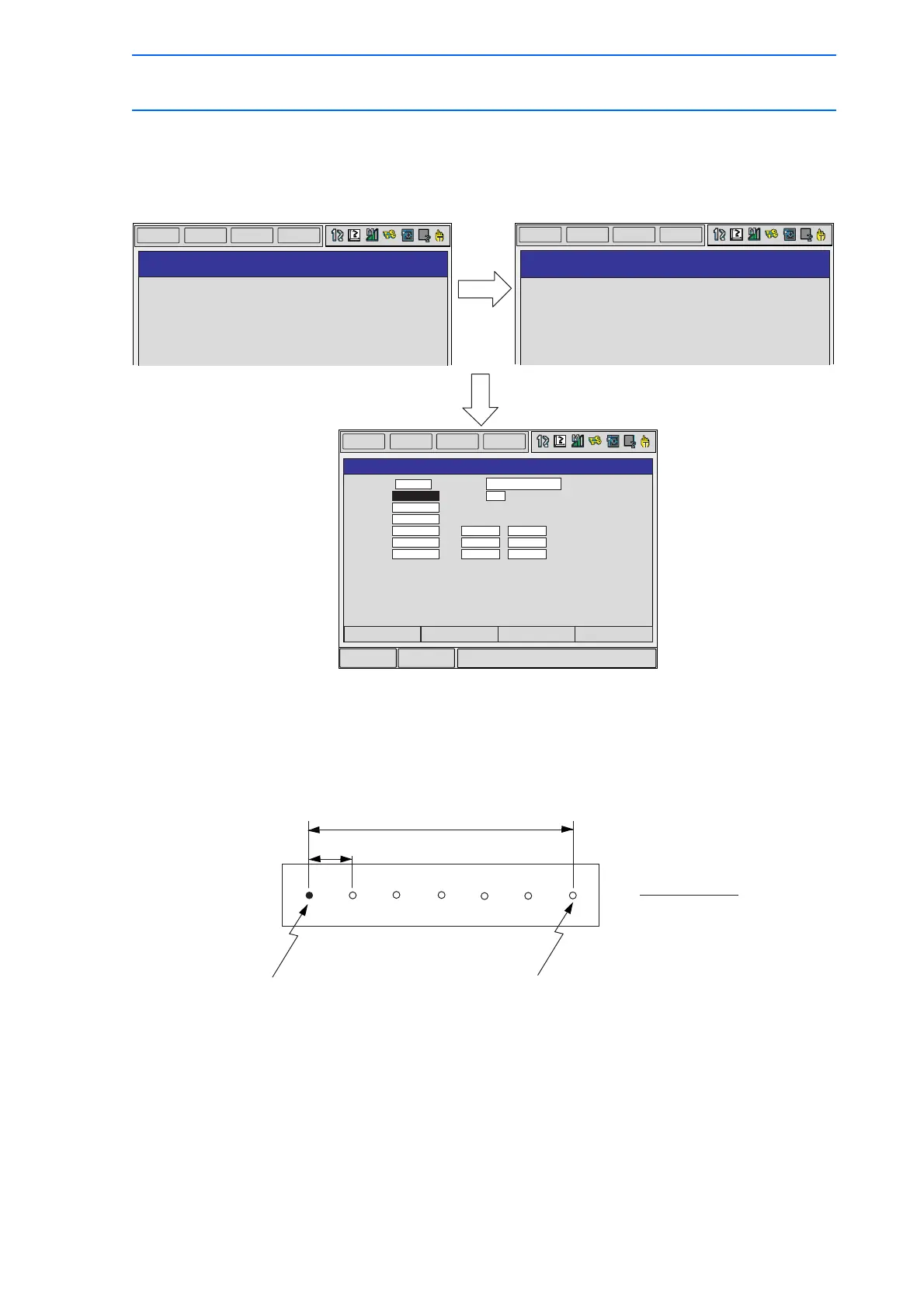
Setting the Shift Value
When setting the shift value for the position variables, use the current position (coordinates) of the
manipulator in the window.
The shift value is the X, Y, and Z difference between the shift position and teaching position and the
difference in angular displacement RX, RY, and RZ (normally set at “0”). If shifting is executed at equal
pitch intervals, for example for palletizing, find the difference between the teaching position and the final
shift position, then divide by the number of pitch intervals (number of divisions) to calculate the shift
value per pitch.
DATA
EDIT
DISPLAY
UTILITY
DATA
EDIT
DISPLAY
UTILITY
DATA
EDIT
DISPLAY
UTILITY
Main Menu ShortCut
POSITION VARIABLE
#P000
R1:X
Y
Z
Rx
Ry
Rz
ROBOT
-100.000
0.000
-100.000
0.00
0.00
0.00
CUR POS
COORDINATE USER COORD #01 TOOL: 00
Differences are assumed to be shift amounts.
Position to be shifted
(Move the manipulator using the programming pendant.)
R1: X
Y
Z
5.360 mm
66.080 mm
316.940 mm
Rx
Ry
Rz
-179.91 deg
-2.17 deg
-102.89 deg
<ROBOT TYPE>
FRONT
UP
NO FLOP
S>= 180
R>= 180
T< 180
Teaching position
CUR POS
COORDINATE USER COORD #01 TOOL: 00
R1: X
Y
Z
105.360 mm
66.080 mm
416.940 mm
Rx
Ry
Rz
-179.91 deg
-2.17 deg
-102.89 deg
<ROBOT TYPE>
FRONT
UP
NO FLIP
S>= 180
R>= 180
T< 180
NAME:
TOOL: 00
<TYPE>
FRONT S>=180
UP R>=180
FLIP T< 180
L2
Teaching position
L1
Final shift position
L2=
Number of pitches
L1

 Loading...
Loading...














