6 Convenient Functions
6.2 Parallel Shift Function
6-5
149235-1CD
RE-CSO-A031
6.2.2 Setting the Shift Value
Registering Position Variables
The NX100 has 128 position variables (P000 to P127); these can be used to define parallel shift values.
When using the parallel shift function, it is necessary to measure the distance between the teaching
point and the shift destination position (XYZ displacement of each coordinate) and then register this in
advance as a position variable.
When the shift instruction is executed in playback, the operation is performed at a location shifted from
the taught position by the amount registered for the specified position variable. The POSITION
VARIABLE window is shown in the following.
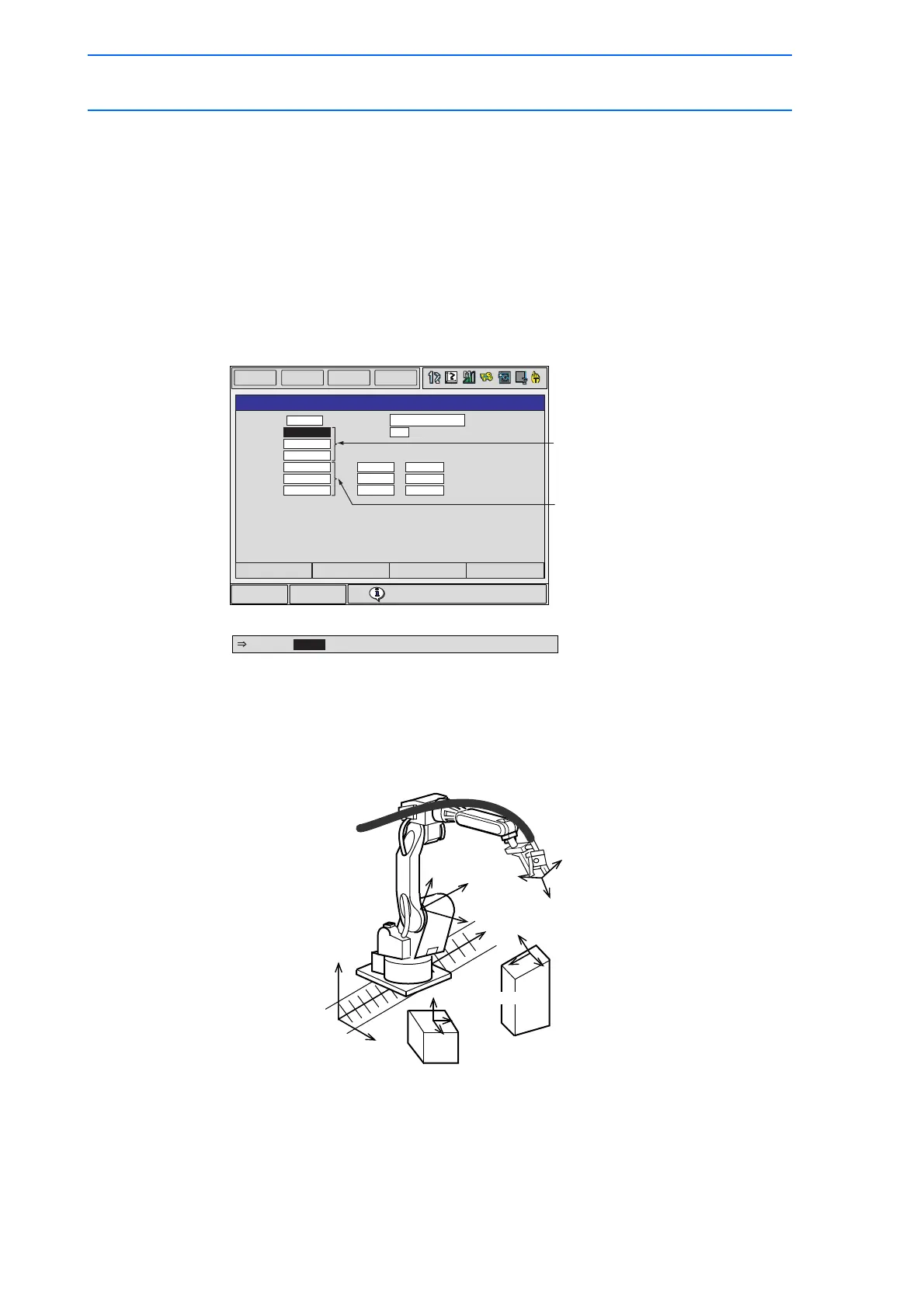
Coordinate Systems
The shift value for parallel shift is X, Y, and Z increment in each coordinates. There are four
coordinates: base coordinates, robot coordinates, tool coordinates, and user coordinates. In systems
with no servo track, the base coordinates and robot coordinates are the same.
DATA
EDIT
DISPLAY
UTILITY
Main Menu ShortCut
!Turn on servo power
POSITION VARIABLE
NAME:
TOOL: 00
<TYPE>
FRONT S>=180
UP
R>=180
FLIP T< 180
#P000
R1:X
Y
Z
Rx
Ry
Rz
ROBOT
-200.000
0.000
500.000
0.00
0.00
0.00
Amount of
shift (mm)
Amount of wrist
displacement (° )
Base coordinates
Robot coordinates
Tool coordinates
User coordinates
User coordinates

 Loading...
Loading...














