6 Convenient Functions
6.4 PAM Function
6-34
149235-1CD
RE-CSO-A031
6.4 PAM Function
6.4.1 Function Overview
The function for position adjustment during playback (PAM: Position Adjustment by Manual) allows
position adjustment by simple operations while observing the motion of the manipulator and without
stopping the manipulator. Positions can be adjusted in both teach mode and play mode.
The following data can be adjusted by key input at the programming pendant.
• Teaching Point (Position)
• Teaching Point (Posture angle): Valid from NS3.00
• Operation Speed
• Position Level
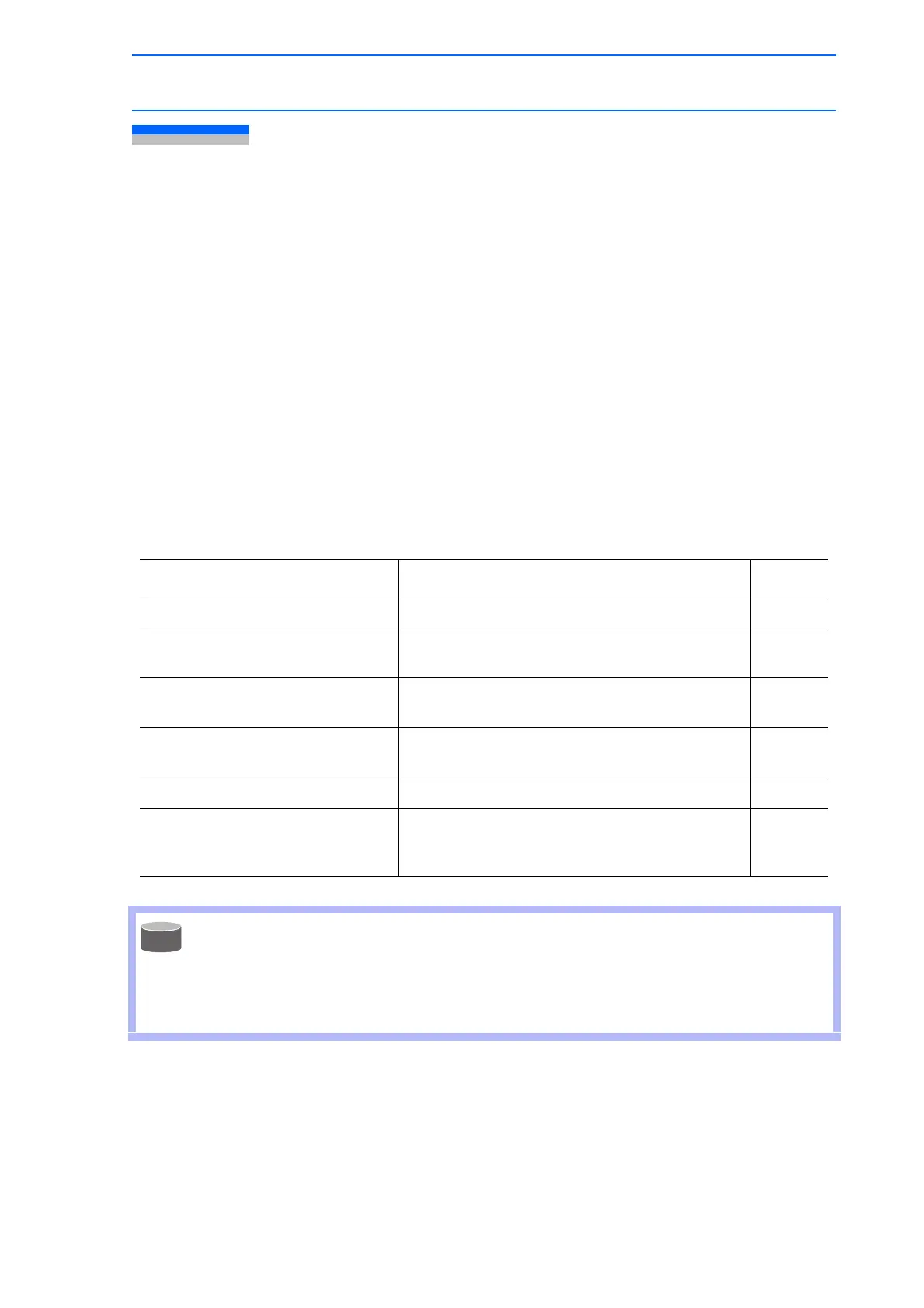
Input Ranges for Adjustment Data
The input ranges for adjustment data are indicated in the following table.
Data Input Range
Number of Steps for Adjustment Up to 10 steps can be adjusted at the same time.
Position Adjustment Range (X, Y, Z) Unit: mm, valid to two decimal places, maximum
±10 mm
Posture Angle Adjustment Range
(Rx, Ry, Rz)
Unit: deg, valid to two decimal places, maximum
±10 deg
Valid from
NS3.00
Speed Adjustment Range (V) Unit: %, valid to two decimal places, maximum
±50%
PL Adjustment Range 0 to 8
Adjustment Coordinates Robot coordinates, base coordinates, tool
coordinates, user coordinates (Default
coordinates: robot coordinates)
The input ranges for adjustment data can be changed by the following parameters:
S3C806: Position adjustment range (unit: mm)
S3C807: Speed adjustment range (unit: 0.01%)
S3C808: Adjustment coordinate specification
S3C810: Posture angle adjustment range (unit: 0.01 deg) [Valid from NS3.00]
For details, refer to chapter 8 "Parameter"

 Loading...
Loading...














