6 Convenient Functions
6.2 Parallel Shift Function
6-3
149235-1CD
RE-CSO-A031
6.2 Parallel Shift Function
6.2.1 Function Overview
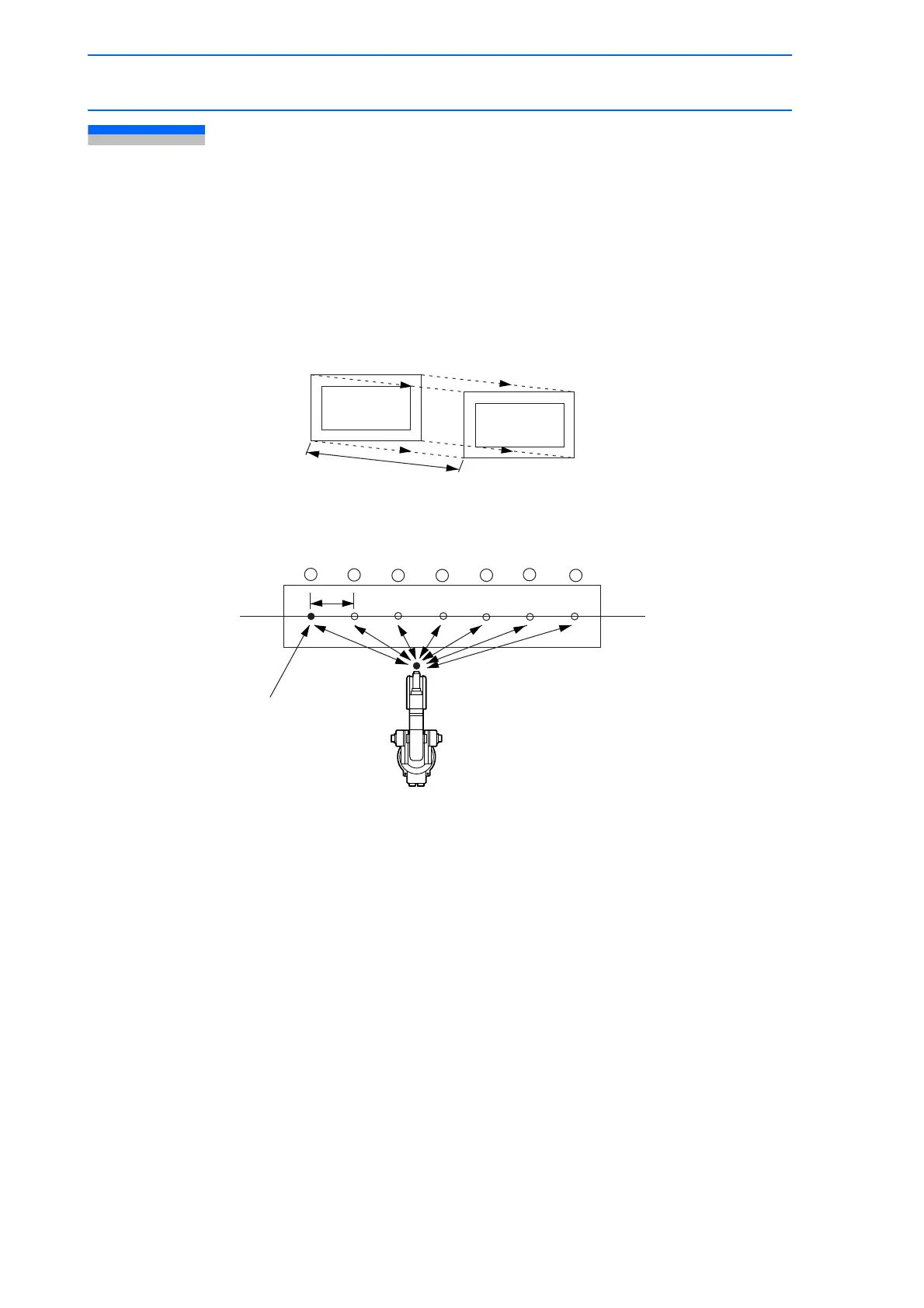
Parallel shift refers to the shifting of an object from a fixed position in such a way that all points within
the object move an equal distance. In the model for parallel shift shown in the following, the shift value
can be defined as the distance L (three-dimensional coordinate displacement). The parallel shift
function is relevant to the actual operation of the manipulator because it can be used to reduce the
amount of work involved in teaching by shifting a taught path (or position).
In the example in the figure below, the taught position A is shifted in increments of the distance L (this is
actually a three-dimensional XYZ displacement that can be recognized by the robot) in order to enable
the operation that was taught at position A to also be performed at positions B through G.
A
B
C
D
E
F
G
L
Teaching position

 Loading...
Loading...














