9 Arc Welding Application
9.11 Weaving Condition File
9-71
149235-1CD
RE-CSO-A031
9.11 Weaving Condition File
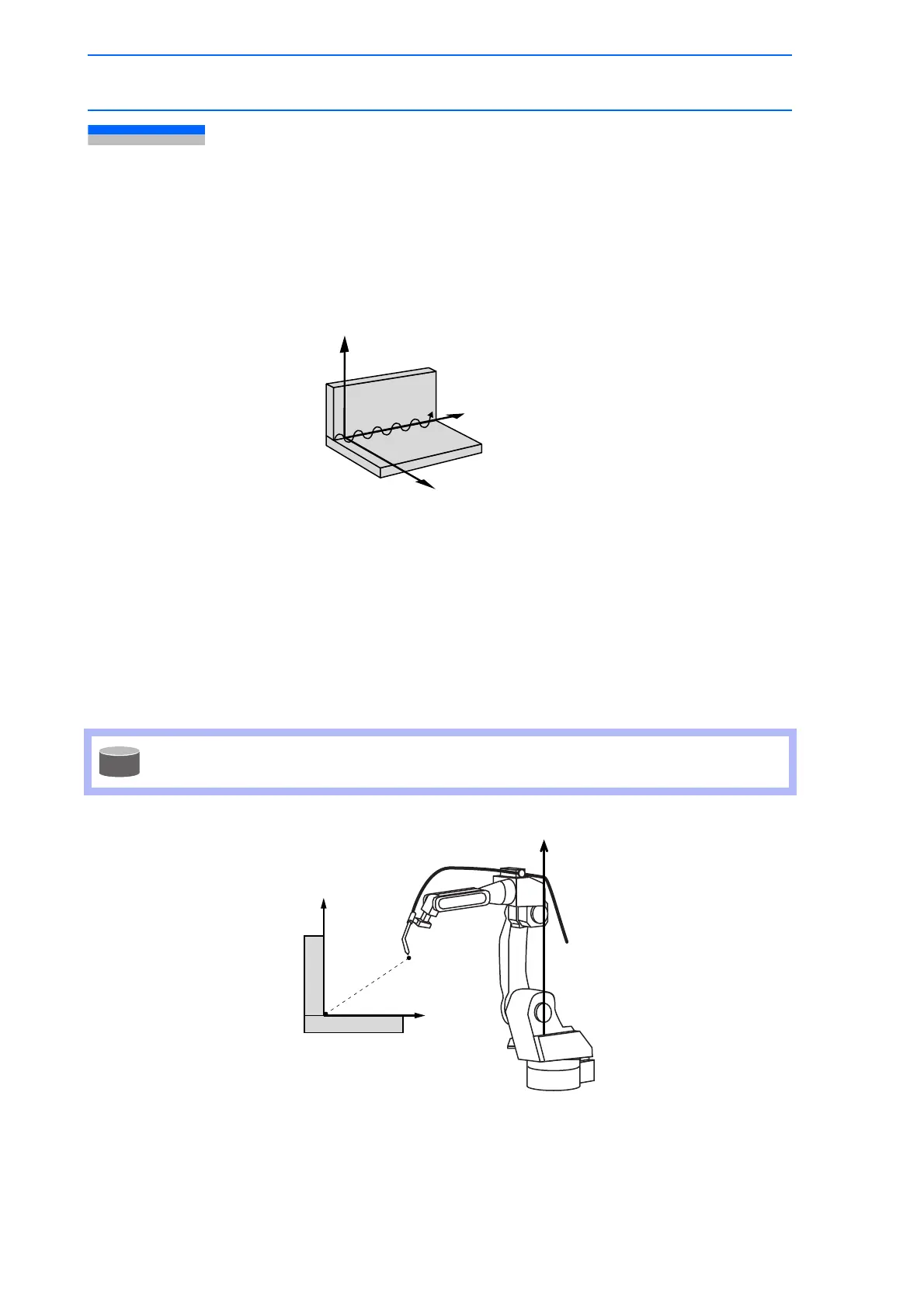
9.11.1 Weaving Basic Coordinate System
Weaving is performed based on the following coordinate system. This coordinate system is
automatically generated when weaving is executed.
Wall Direction: Z-direction of the robot axis
Horizontal Direction: The direction to the approach point from the wall
Direction of Travel: The direction in which the manipulator moves from the weaving start
point to the end point
The approach point is a point indicated by a step immediately before the step where
weaving starts.
Horizontal direction
Weaving Basic Coordinate System
Direction of travel
Wall direction
Wall direction
Z-axis
Horizontal
direction
Approach point

 Loading...
Loading...














