8 Parameter
8.2 Motion Speed Setting Parameters
8-5
149235-1CD
RE-CSO-A031
S1CxG057: SEARCH MAX. SPEED
Units: 0.1mm/s
This parameter specifies the max. speed for searching.
S2C153: POSTURE CONTROL AT CARTESIAN OPERATION OF
JOG
This parameter specifies whether or not posture control is performed at cartesian operation of “JOG” by
the programming pendant. Use posture control unless a special manipulator model is used.
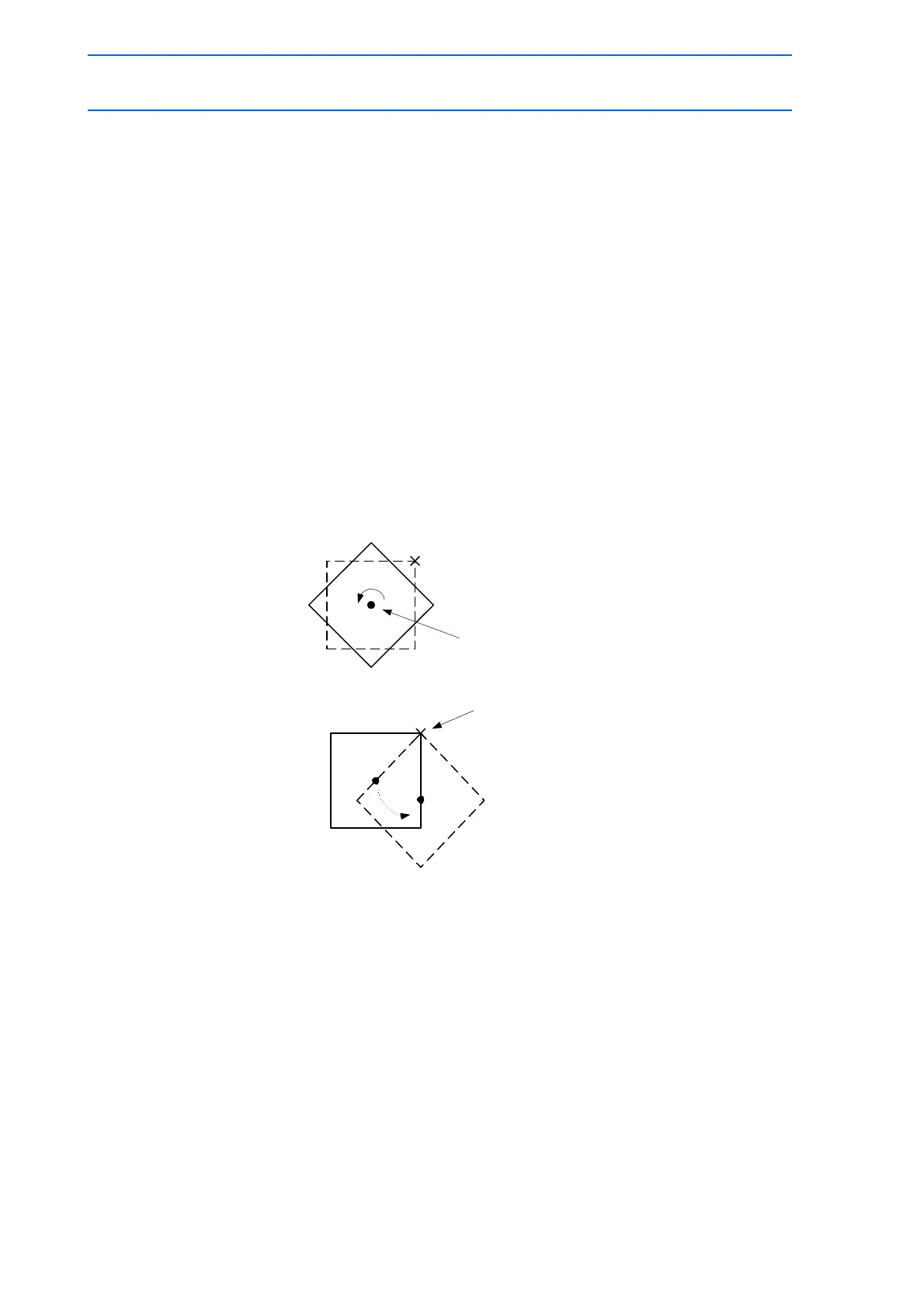
S2C154: OPERATION IN USER COORDINATE SYSTEM (WHEN
EXTERNAL REFERENCE POINT CONTROL FUNCTION USED)
This parameter specifies the TCP or reference point of motion about TCP when the external reference
point control function is used and the user coordinate system is selected by the programming pendant.
0: When manipulator TCP is selected
1: When external reference point is selected
S2C238: CONTROLLED GROUP JOB TEACHING POSITION
CHANGE
This parameter is used to change only the job teaching position of controlled group axis.
0: With posture control
1: Without posture control
0: Not changed
1: Changed

 Loading...
Loading...














