8 Parameter
8.4 Parameters according to Interference Area
8-32
149235-1CD
RE-CSO-A031
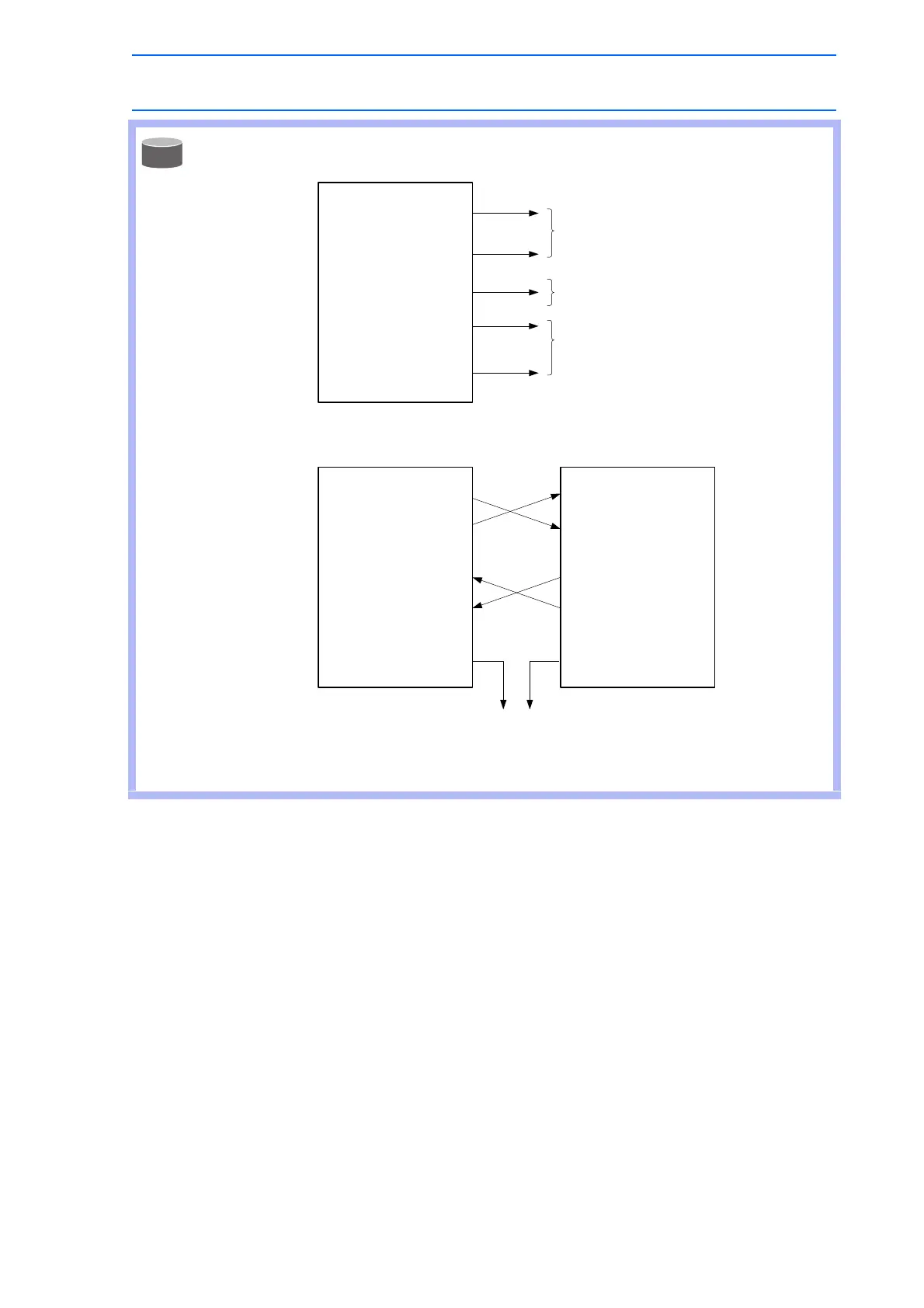
S2C188 to S2C193: ROBOT INTERFERENCE CHECK
This parameter specifies whether to check interference between robots 1, 2, 3, and 4. Interference
check is executed in the spherical range having the TCP in the center. If “provided” is selected, also
select the following parameters.
ROBOT INTERFERENCE CHECK (units: μm)
S3C000 to S3C023: CUBE SOFT LIMIT
These parameters specify auxiliary functions of S2C001 parameter. For details, see the explanation of
the S2C001 parameter.
Connection Example Where Two Manipulators are Operated in the Same Area
S3C801 : ROBOT1 SPHERE RADIUS
S 3 C 8 0 2 : R O B O T 2 S P H E R E R A D I U S
S3C803 : ROBOT3 SPHERE RADIUS
S3C804 : ROBOT4 SPHERE RADIUS
Operating inside
CUBE1
Operating inside
CUBE2
Interference waiting
Inside CUBE1
entrance prohibit
Inside CUBE2
entrance prohibit
NX100
Operating inside
CUBE1
Operating inside
CUBE2
Inside CUBE1
entrance prohibit
Inside CUBE2
entrance prohibit
Interference waiting
Inside CUBE1
entrance prohibit
Inside CUBE2
entrance prohibit
Operating inside
CUBE1
Operating inside
CUBE2
Interference waiting
Manipulator A Manipulator B
Alarm signal
Output in cube during
operation.
Output during waiting by
entrance prohibit signal.
These signals are checked
when entering the cube.

 Loading...
Loading...














