8 Parameter
8.2 Motion Speed Setting Parameters
8-9
149235-1CD
RE-CSO-A031
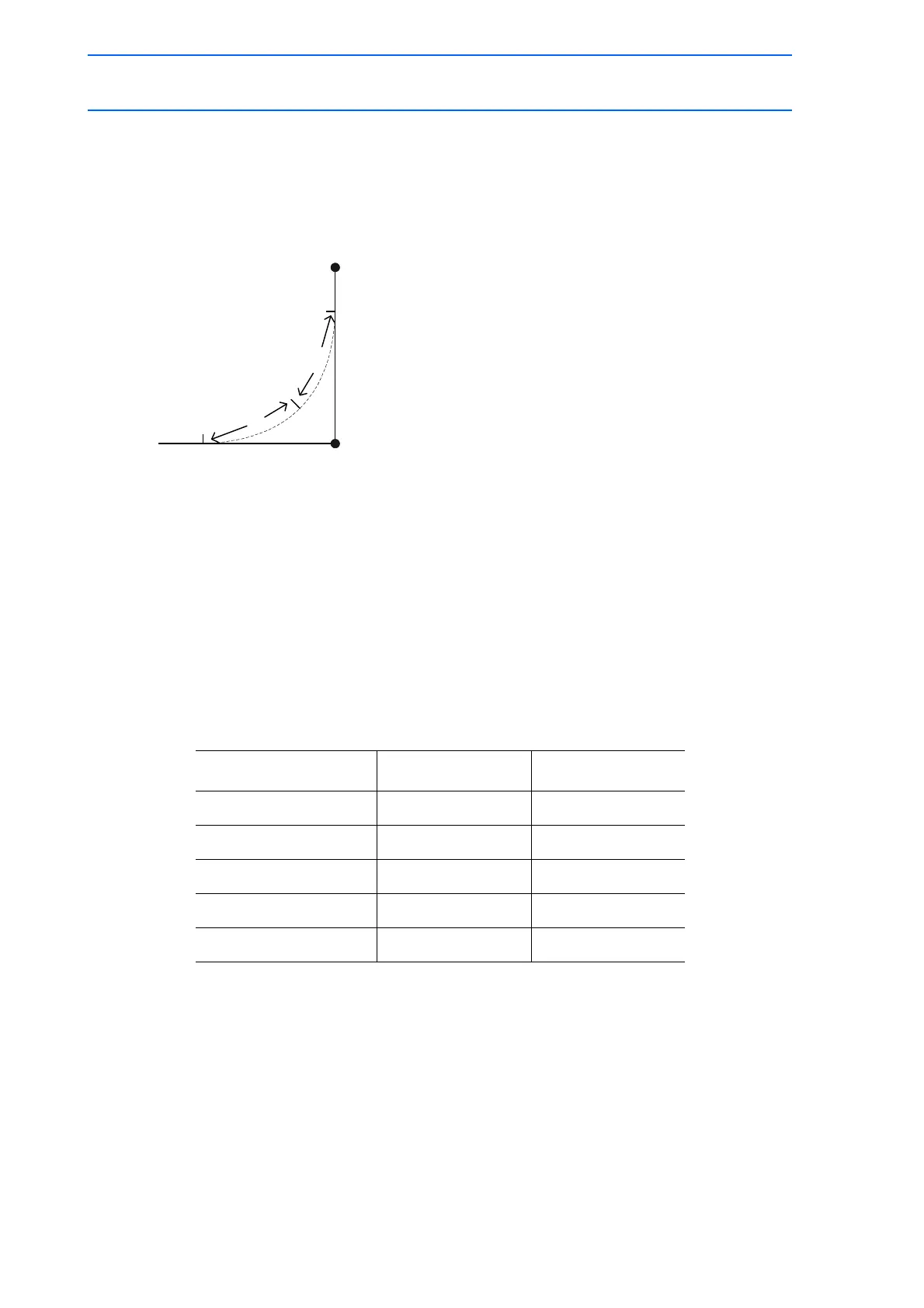
S2C516: EMERGENCY STOP CURSOR ADVANCE CONTROL
FUNCTION CONT PROCESS COMPLETION POSITION
Units: %
When the manipulator stops during moving inner corner by CONT process, this parameter specifies
which position of the inner corner should be considered as the end of step.
S2C517: EMERGENCY STOP ADVANCE CONTROL
FUNCTION WORK START INSTRUCTION STEP MOTION
COMPLETION DELAY TIME
Units: ms
In order to recognize securely the completion of motion to the step of work start instruction (such as
ARCON instruction), this parameter specifies the delay time for motion completion of the work start
instruction step only.
S2C560: BASE AXIS OPERATION KEY ALLOCATION SETTING
Axis number order: X: First axis, Y: Second axis, Z: Third axis
Specified: X: X-direction (RECT-X), Y: Y-direction (RECT-Y), Z: Z-direction (RECT-Z)
Parameter Setting and Jog Operation Key Allocation
Coordinates/Parameter S2C560= “0” S2C560= “1”
Joint Axis number order Specified
Cylindrical Axis number order Specified
Cartesian Specified Specified
Tool Specified Specified
User Specified Specified
A
B
50%
100%
0%
Step 4
Step 3
When 50% is set, moves to Step 3 if the manipulator stops
in A section, and to Step 4 if the manipulator stops in B
section.

 Loading...
Loading...














