6 Convenient Functions
6.3 Parallel Shift Job Conversion Function
6-17
149235-1CD
RE-CSO-A031
6.3.2 Coordinate Systems for Conversion
When performing parallel shift job conversion, it is necessary to specify the coordinate systems in
which the conversion is to be performed. The coordinate system can be selected from the following:
• Base coordinates
• Robot coordinates
• Tool coordinates
• User coordinates (24 types)
• Master tool coordinates (R*+R* job)
• Joint coordinates
In the case of an ordinary job for which group axes are registered, shift conversion is performed in
accordance with the selected coordinate system. The relationship between group combinations and
coordinates are shown in the following table.
to in the table are followed by their explanations.
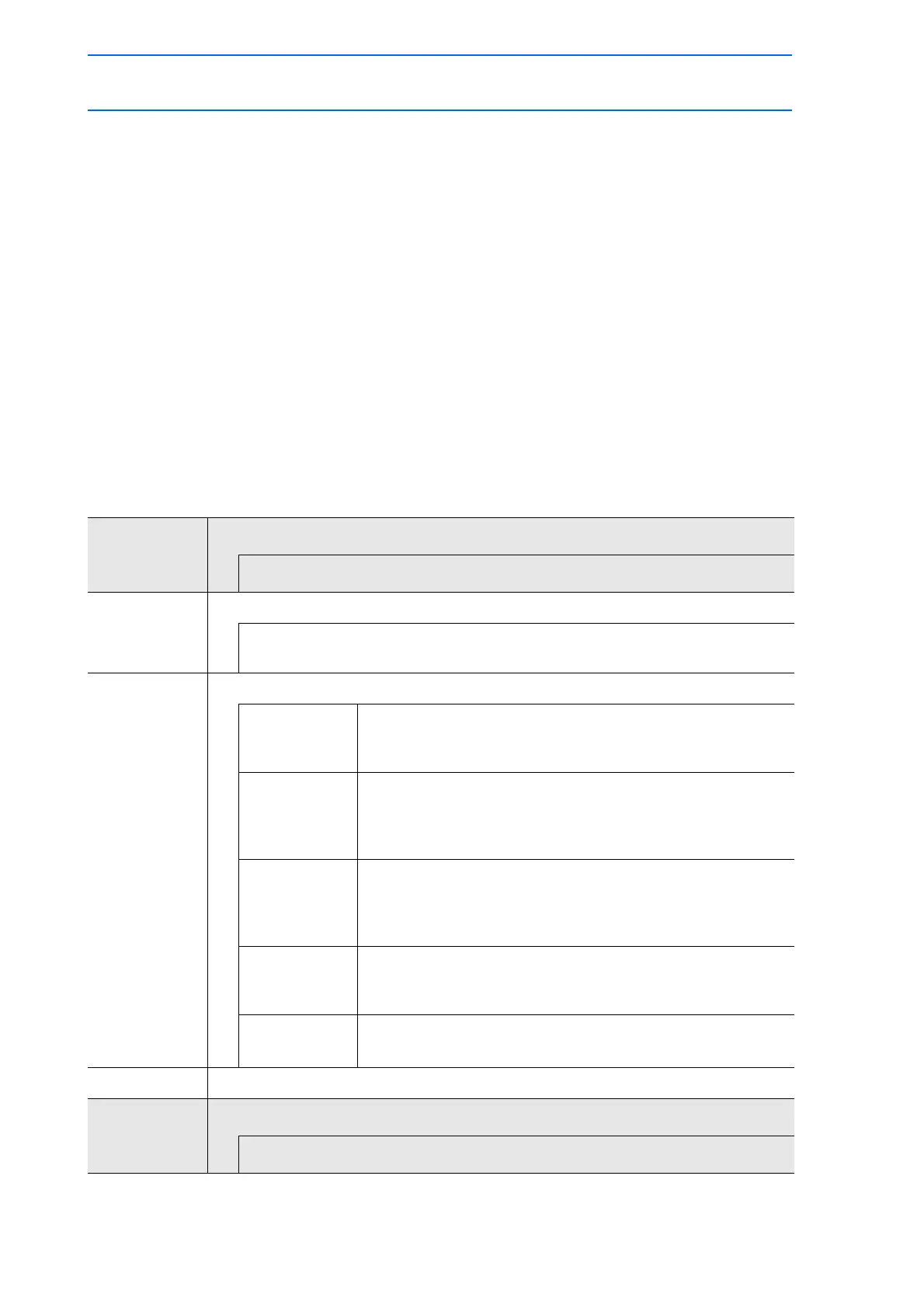
Relationship Between Group Combinations and Coordinates at Conversion
Group
Combination
in Job
Explanation
Usable Coordinate System
R Shift is performed on basis of selected coordinates.
Base coordinates, robot coordinates, tool coordinates, user coordinates, pulse
coordinates
R(B) Shift is performed on basis of selected coordinates.
Base
Coordinates
The base axis is shifted by the specified amount and the TCP
of the manipulator is shifted by the specified amount in the
base coordinates.
Robot
Coordinates
The base axis is shifted by the specified amount.
The TCP of the manipulator is shifted by the specified amount
in the robot coordinates. These shifts are carried out
independently.
Tool
Coordinates
The base axis is shifted by the specified amount.
The TCP of the manipulator is shifted by the specified amount
in the tool coordinates. These shifts are carried out
independently.
User
Coordinates
The base axis is shifted by the specified amount and the TCP
of the manipulator is shifted by the specified amount in the
user coordinates.
Pulse
Coordinates
The taught position of each axis is shifted by the specified
amount on the basis of pulse values.
S Shift is performed on the basis of pulse values regardless of the coordinates.
Group
Combination
in Job
Explanation
Usable Coordinate System

 Loading...
Loading...














