3 Teaching
3.9 Other Job-editing Functions
3-76
149235-1CD
RE-CSO-A031
Manipulator Types
When robot axis position data is described in the XYZ format, a number of solutions are obtained from
the manipulator’s structure when moving it to the described position. In order to select one appropriate
solution, it is necessary to specify the manipulator type. This manipulator type is called “Type.” There
are up to six types in NX100 system. These types also vary according to the manipulator models.
• Flip/No Flip: R-axis Position
• R-axis Angle
• T-axis Angle
• Front/Back: Relationship Between the S-axis and TCP
• Upper Arm/Lower Arm: Type Comprised of the L- and U-axes
• S-axis Angle
These six types are described in the following:
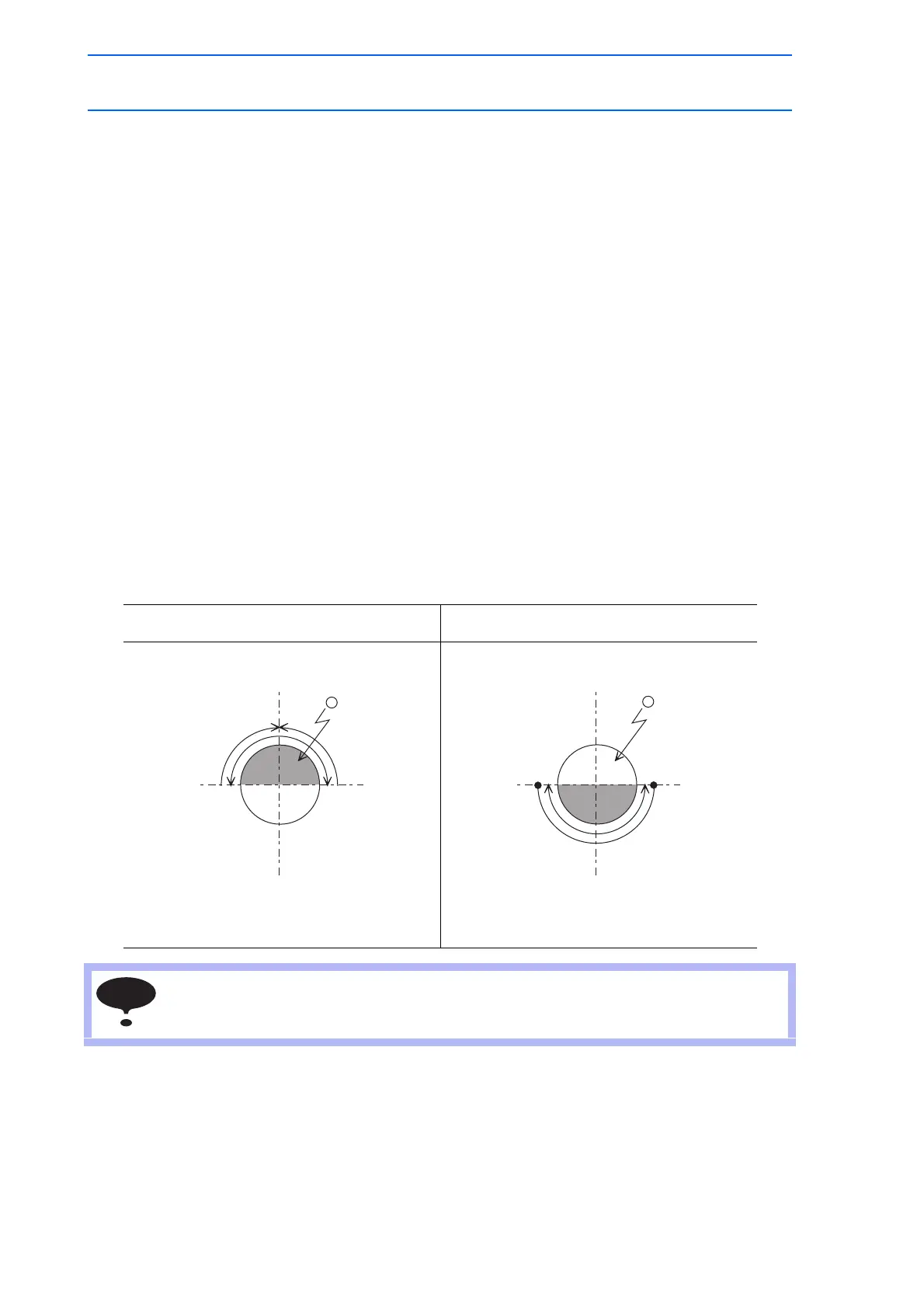
• Flip/No Flip
This shows the R-axis position.
When the R-axis is in the position at A as shown in the following diagram, it is known as
“Flip;” when it is in the B position, it is called “No Flip.” However, in a manipulator in which
the R-axis can move more than ±180
° even in position A, it is necessary to specify
whether the R-axis is from -90
° to 90°, or from 270° to 360°, or from -360° to -270°. The
same is true for the B position. This is set at the following “R-axis Angle.”
Flip No Flip
-90 < θ R ≤ 90
270 < θ R ≤ 360, -360 < θ R ≤ -270
90 < θ R ≤ 270
-270 < θ R ≤ -90
θ R is the angle when the R-axis home position is 0°.

 Loading...
Loading...














