2 Manipulator Coordinate Systems and Operations
2.3 Coordinate Systems and Axis Operation
2-14
149235-1CD
RE-CSO-A031
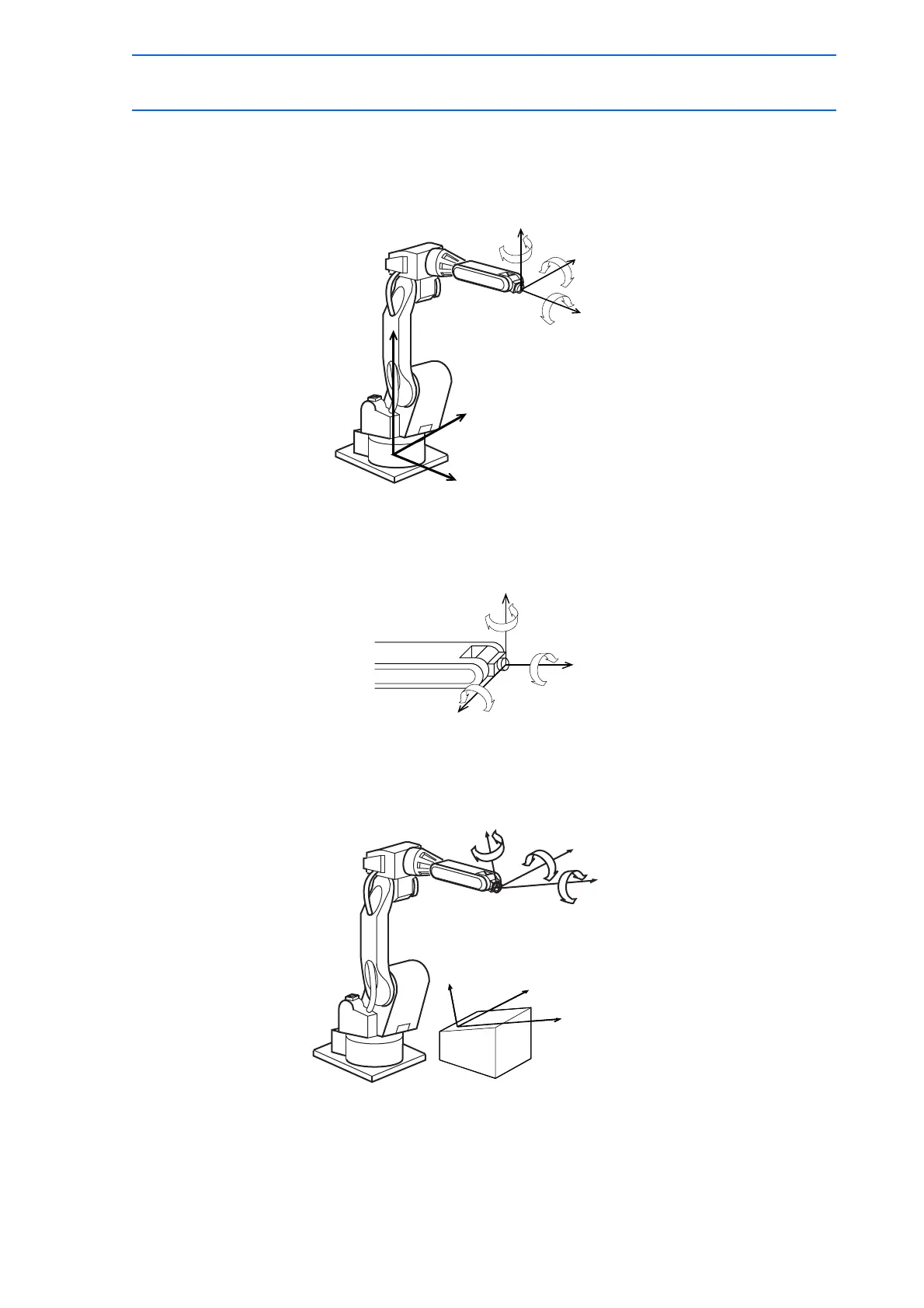
• In cartesian or cylindrical coordinates, wrist axis rotations are based on the X-, Y-, or Z-
axis.
• In tool coordinates, wrist axis rotations are based on X-, Y-, or Z-axis of the tool coordi-
nates.
• In user coordinates, wrist axis rotations are based on X-, Y-, or Z-axis of the user coordi-
nates.
Z-axis
+
+
+
−
−
−
Y-axis
X-axis
Z-axis
Y-axis
X-axis
Z -axis
X-axis
Y-axis
Z-axis
X-axis
Y-axis
+
+
+
−
−
−

 Loading...
Loading...














