AKD BASIC User Guide | 4 Quick Reference: Parameters, Functions, Operators
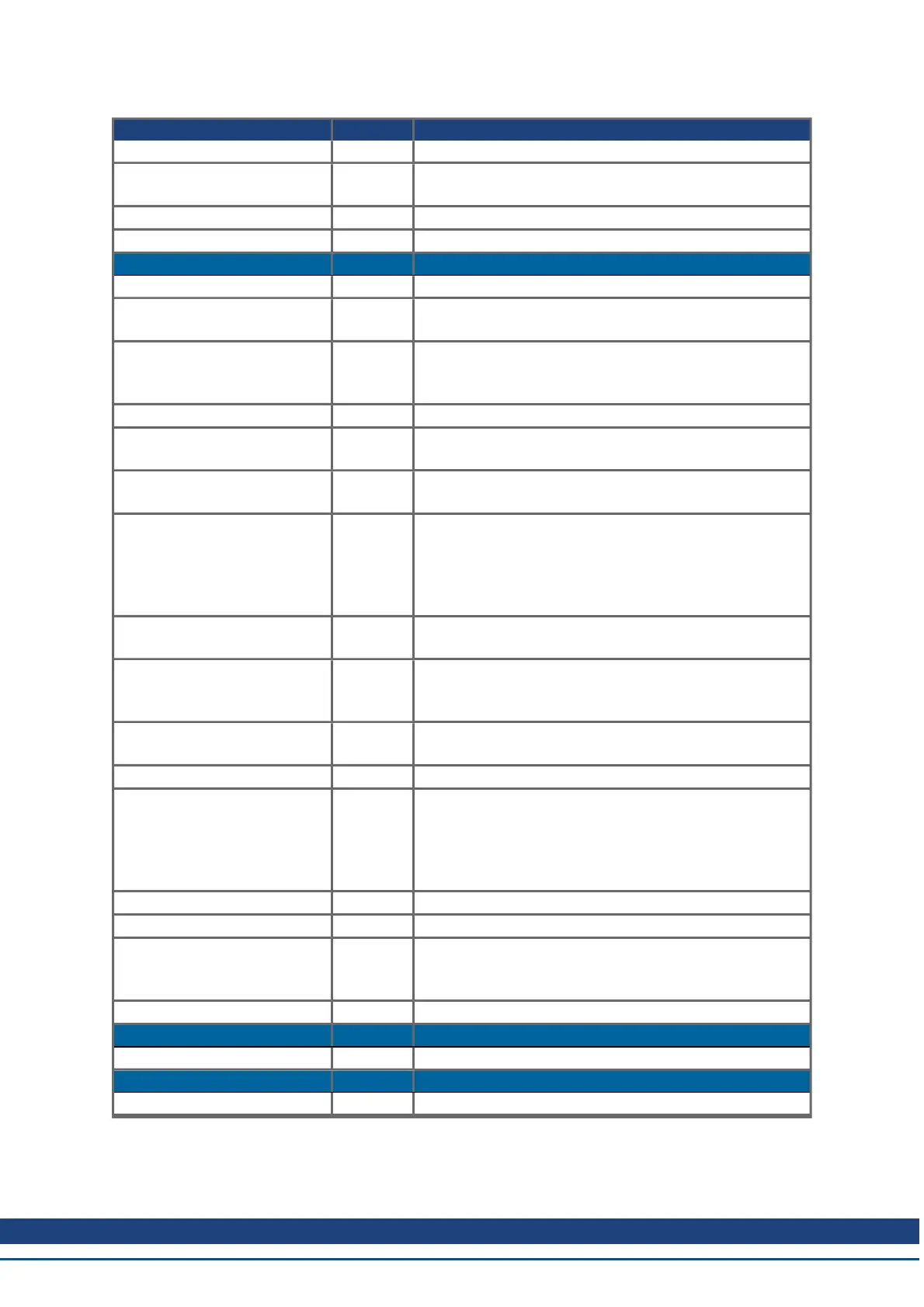
Parameter Type Description
TAN() Function TAN(x) returns the tangent of x, where x is in radians.
TRIM$() Function Returns a copy of the original string with leading and trailing
blanks removed.
UCASE$() Function Converts a string expression to uppercase characters.
VAL() Function Returns the numerical value of a string.
Camming (CAM)
CAM.ACTIVATE Statement Activates the specified cam table.
CAM.ADDPOINT Statement CAM.ADDPOINT(Master Position, Slave Position) Adds
the specified "point" to the cam table being created.
CAM.CORRECTDIR R/W Specifies the direction of the correction move when a new
cam table is activated (set CAM.ACTIVATE = n) or when
speed synchronization is achieved.
CAM.CREATE Statement CAM.CREATE (x, y) Initiates the creation of a cam table.
CAM.MASTER R/W Specifies the source of the input to the cam table for cam
profiling.
CAM.MASTERPOS R/O Gives the value of the master position presently being used
as the input to the cam table.
CAM.SLAVEOFFSET R/O CAM.SLAVEOFFSET indicates the offset (or difference)
between MOVE.POSCOMMAND and the position com-
mand that is calculated from the active cam table based
upon the present value of EXTENCODER.POSITION
and/or CAMVM.POSITION.
CAMVM.DIR R/W Specifies the direction the virtual encoder goes when
CAMVM.GOVEL is executed.
CAMVM.FREQ R/W CAMVM.FREQ sets the maximum frequency allowed dur-
ing a relative (CAMVM.GOREL) move, and sets the com-
manded speed during a velocity move (CAMVM.GOVEL)
CAMVM.GOREL Statement Makes the virtual master move the distance specified by
CAMVM.RELATIVEDIST.
CAMVM.GOUPDATE Statement Updates a move in progress with new move parameters.
CAMVM.GOVEL Statement CAMVM.GOVEL (Go at Velocity) causes the virtual
master to move continuously at the frequency specified by
CAMVM.FREQ in the direction (positive or negative) spec-
ified by CAMVM.DIR. The frequency or direction is mod-
ified during the move using CAMVM.GOUPDATE.
CAMVM.MOVING R/O Indicates if the virtual encoder is moving.
CAMVM.POSITION R/W Contains the current value of the virtual encoder counter.
CAMVM.RELATIVEDIST R/W Specifies the number or counts that the virtual encoder (vir-
tual master) will put out during an incremental move
(CAMVM.GOREL).
CAMVM.STOP Statement CAMVM.STOP stops the virtual encoder
Drive (DRV)
DRV.SWENABLE R/W Controls whether power can flow to the motor.
Electronic Gearing (EGEAR)
EGEAR.ACCLIMIT R/W EGEAR.ACCLIMIT sets the maximum acceleration.
Kollmorgen™ | March 30, 2012 58