AKD BASIC User Guide | 4 Quick Reference: Parameters, Functions, Operators
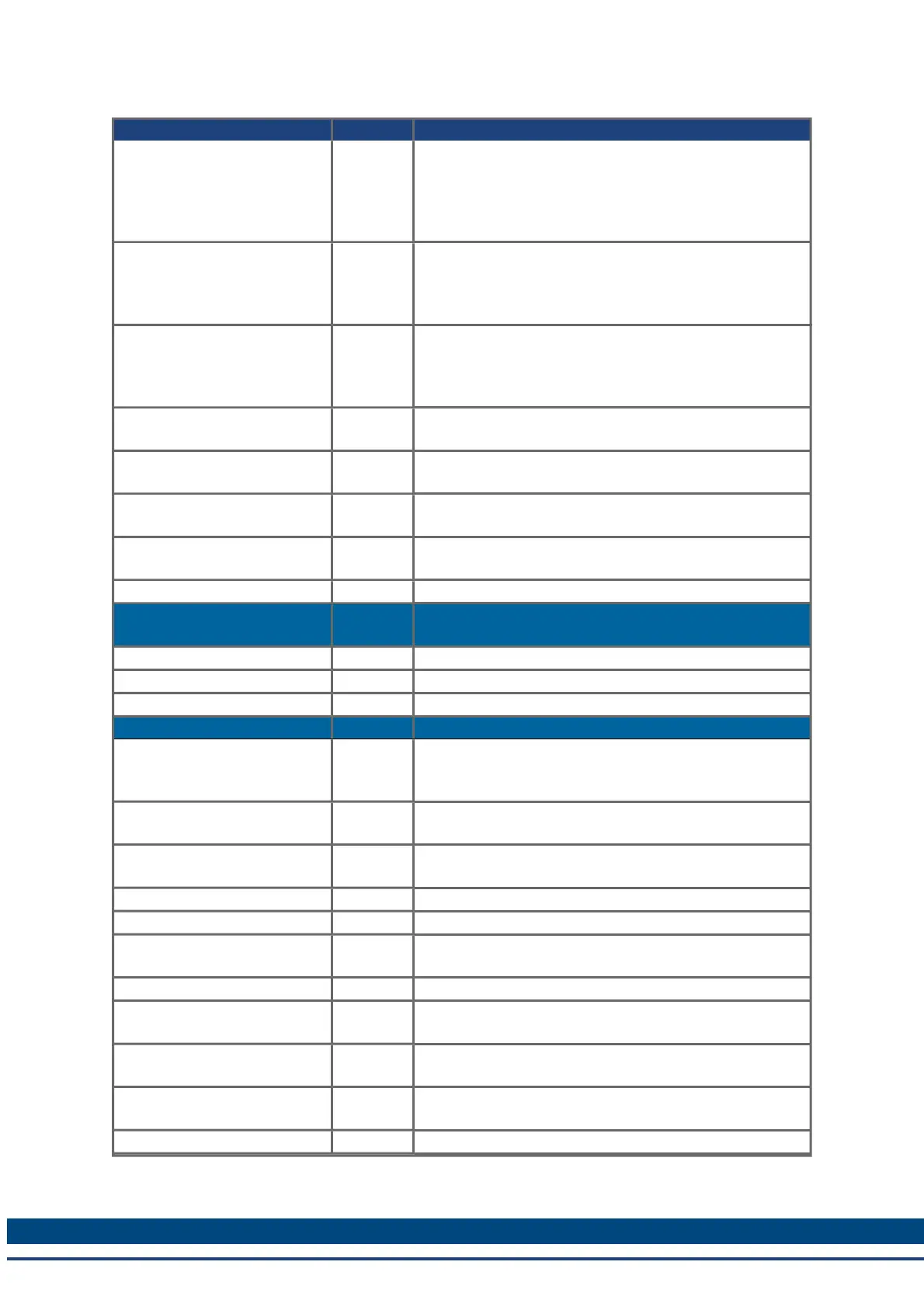
Parameter Type Description
EGEAR.DECLIMIT R/W EGEAR.DECLIMIT sets the maximum deceleration that
will be commanded on the follower when EGEAR.ON is
turned OFF or the electronic gearing ratio (EGEAR.RATIO
or EGEAR.PULSESOUT / EGEAR.PUSLESIN ) is
decreased.
EGEAR.ERROR R/W Indicates the amount of position deviation that has accumu-
lated on the slave axis (in an electronic gearing application)
as a result of the slave axis limiting its acceleration or decel-
eration while achieving velocity synchronization.
EGEAR.LOCK R/O EGEAR.LOCK indicates when the slave axis (follower
axis) in an electronic gearing application has achieved
velocity synchronization with the electronic gearing
master.
EGEAR.ON Command Starts the electronic gearing; active in opmode 2 (position)
only.
EGEAR.PULSESIN R/W Specifies the number of encoder counts used when spec-
ifying an exact electronic gearing ratio.
EGEAR.PULSEOUT R/W Specifies the number of position counts used in an exact
electronic gearing ratio.
EGEAR.RATIO R/W Sets the electronic gearing ratio (rev to rev) between the
encoder shaft (master) and the motor shaft (slave).
EGEAR.TYPE R/W Sets the allowed direction of motion for electronic gearing.
External Encoder (EXTEN-
CODER)
EXTENCODER.FREQ R/O Gets the external encoder (EEO) velocity.
EXTENCODER.POSITION R/O Gets the external encoder (EEO) position.
EXTENCODER.POSMODULO R/W Sets/gets the external encoder (EEO) modulo position.
Interrupt (INTR)
Interrupt...End Interrupt Statement The interrupt feature permits execution of a user-defined
subroutine upon receipt of a hardware interrupt signal or a
pre-defined interrupt event.
INTR.DIN1HI Enables interrupt for when DIN1.STATE to DIN7.STATE
goes from 0 to 1, respectively.
INTR.DIN1LO Enables interrupt for when DIN1.STATE to DIN7.STATE
goes from 1 to 0, respectively.
INTR.DISABLE Enables interrupt for when the drive gets disabled.
INTR.DRV.FAULTS Enables interrupt for when the drive faults.
INTR.DRV.HWENABLE Enables interrupt for when DRV.HWENABLE goes from 0
to 1.
INTR.DRV.WARNINGS Enables interrupt for when the drive produces a warning.
INTR.HWLS.NEGSTATE Enables interrupt for when HWLS.NEGSTATE goes from 0
to 1.
INTR.HWLS.POSSTATE Enables interrupt for when HWLS.POSSTATE goes from 0
to 1.
INTR.MODBUS Enables interrupt for when a Modbus User Parameter
changes.
INTR.PL.ERR Enables interrupt for when PL.ERR= PL.ERRFTHRESH.
59 Kollmorgen™ | March 30, 2012