AKD BASIC User Guide | 4 Quick Reference: Parameters, Functions, Operators
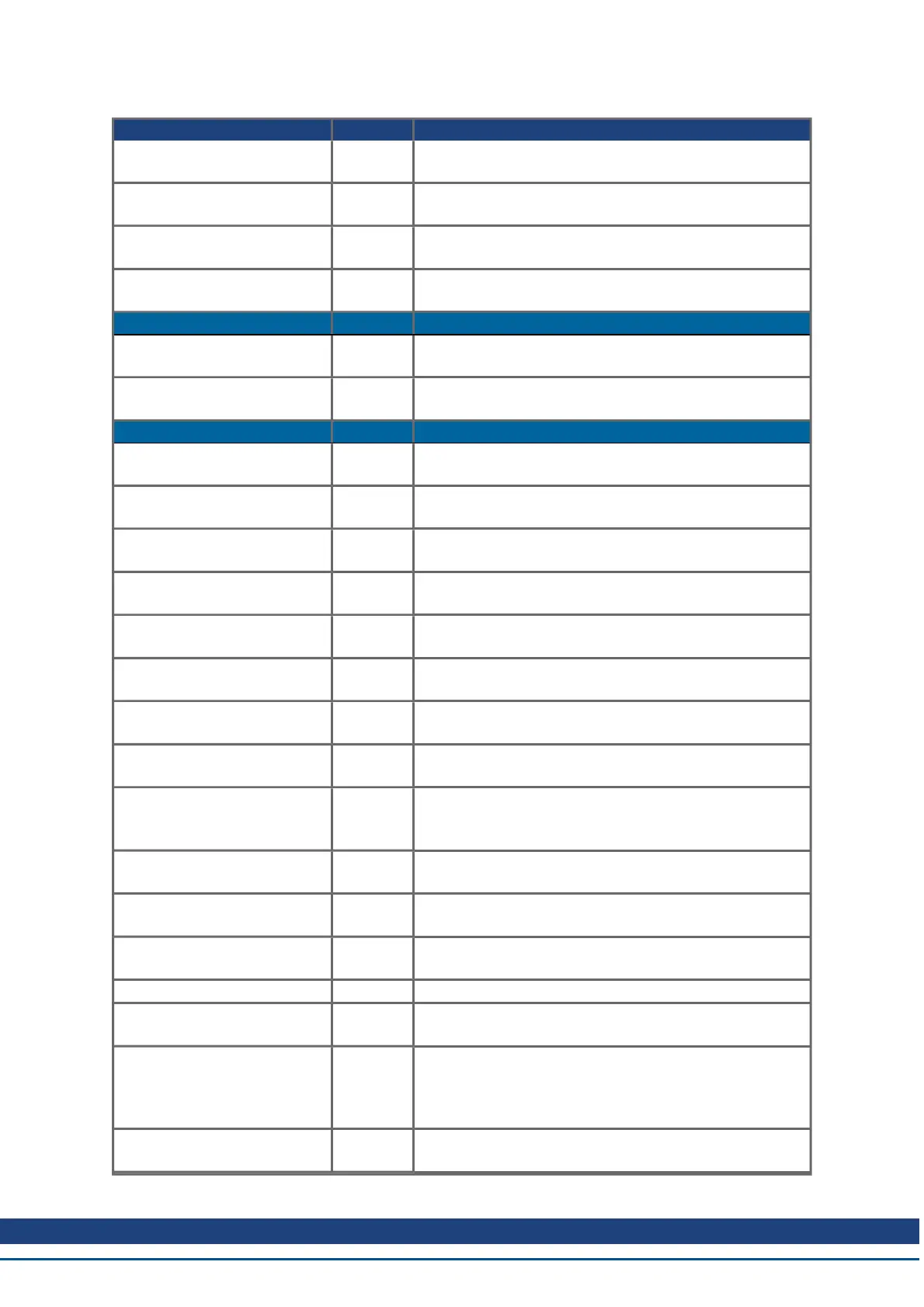
Parameter Type Description
INTR.PLS.P1 to INTR.PLS.P8 Enables interrupt for when PLS1 to PLS8 is enabled and
goes high, respectively.
INTR.SWLS.LIMIT0 Enables interrupt for when PL.FB > SWLS.LIMIT0 (if
SWLS.LIMIT0 is the upper limit)
INTR.SWLS.LIMIT1 Enables interrupt for when PL.FB < SWLS.LIMIT1 (if
SWLS.LIMIT1 is the lower limit)
INTR.TIMER Executes interrupt after a number of milliseconds specified
by VM.INTRTIMER.
MODBUS Parameters
MODBUS.READFLOAT R/W This function reads a floating-point value from the specified
ModBus slave and returns the value read.
MODBUS.WRITEFLOAT R/W This statement writes a floating-point value to the specified
ModBus slave.
Move Parameters (MOVE)
MOVE.ABORT Command MOVE.ABORT stops motor motion and allows continued
program execution.
MOVE.ACC R/W Sets the maximum commanded acceleration rate when the
speed is increased.
MOVE.DEC R/W Sets the maximum commanded deceleration rate when the
speed is decreased.
MOVE.DIR R/W MOVE.DIR specifies the direction the motor turns when a
MOVE.GOVEL statement is executed.
MOVE.GOABS Command MOVE.GOABS moves the motor to the position specified
by MOVE.TARGETPOS.
MOVE.GOHOME Command MOVE.GOHOME causes the motor to move to the position
specified where PL.FB = 0.
MOVE.GOREL Command MOVE.GOREL moves the motor a distance specified by
MOVE.RELATIVEDIST.
MOVE.GOUPDATE Command MOVE.GOUPDATE updates a move in progress with new
move parameters.
MOVE.GOVEL Command MOVE.GOVEL moves the motor at a constant speed spec-
ified by MOVE.RUNSPEED and direction specified by
MOVE.DIR.
MOVE.INPOSITION R/O Indicates whether or not the motor has achieved command
position.
MOVE.INPOSLIMIT R/W Specifies the tolerance of Position Error (PL.ERR) within
which the MOVE.INPOSITION flag will be set to 1 (True).
MOVE.MOVING R/O Indicates whether or not the commanded motion profile is
complete.
MOVE.POSCOMMAND R/W Current Position Command from Trajectory Generator.
MOVE.RELATIVEDIST R/W Specifies the distance the motor turns during a relative
move (MOVE.GOREL).
MOVE.RUNSPEED R/W Sets the maximum speed allowed during a relative
(MOVE.GOREL) or absolute (MOVE.GOABS) move, and
sets the commanded speed during a velocity move
(MOVE.GOVEL).
MOVE.SCURVETIME R/W Sets the amount of S-curve smoothing applied to all veloc-
ity profiles.
Kollmorgen™ | March 30, 2012 60