AKD BASIC User Guide | 4 Quick Reference: Parameters, Functions, Operators
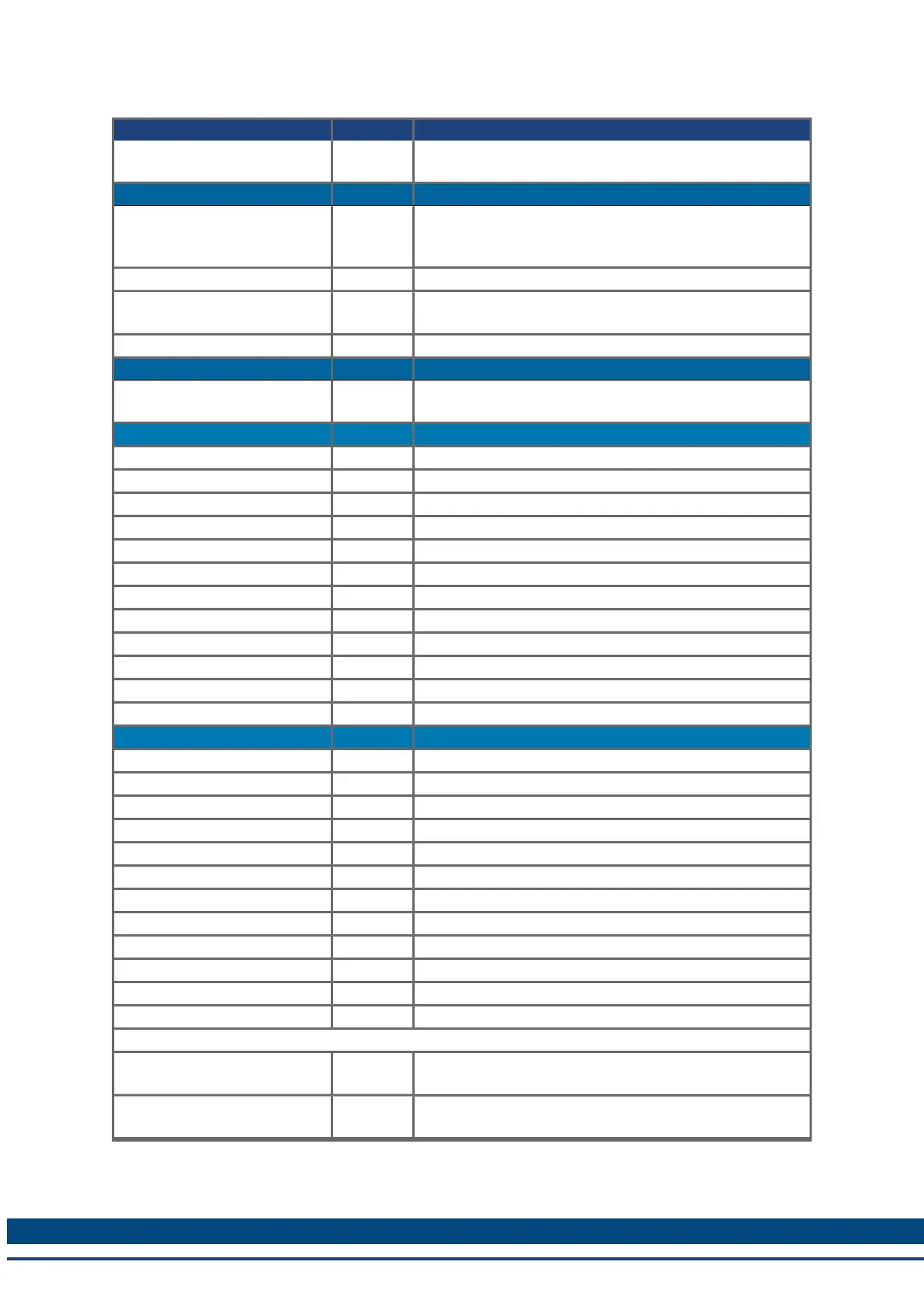
Parameter Type Description
MOVE.TARGETPOS R/W MOVE.TARGETPOS specifies the target position for an
absolute (MOVE.GOABS) move.
Virtual Machine (VM)
VM.AUTOSTART R/W VM.AUTOSTART specifies whether or not the program in
the AKD BASIC starts executing automatically when AC
power is applied.
VM.ERR R/W Indicates what caused the most recent Runtime Error.
VM.INTRTIMER R/W Sets a number of milliseconds before
INTR.TIMERexecutes after it is called.
VM.RESTART Command Restart AKDBASIC virtual machine.
WHEN
When Statement The WHEN statement is used for very fast response to cer-
tain input conditions.
When Conditons
PL.FB < value
PL.FB> value
PL.CMD < value
PL.CMD> value
DRV.HANDWHEEL < value
DRV.HANDWHEEL > value
DRV.TIME > value
DINx.STATE = 0 or 1
FB3.P < value
FB3.P > value
MOVE.MOVING = 0 or 1
MOVE.INPOSITION = 0 or 1
When Actions
Continue
DOUT1.STATEU = 0 or 1
DOUT2.STATEU = 0 or 1
EGEAR.RATIO = value
MOVE.ABORT
MOVE.GOABS
MOVE.GOREL
MOVE.GOVEL
MOVE.GOABSREG
MOVE.GOHOME
MOVE.GORELREG
MOVE.GOUPDATE
WHEN.DRVHANDWHEEL R/O Records the value of DRV.HANDWHEEL when the when-
condition is satisfied.
WHEN.DRVTIME R/O Records the value of Time when the when-condition is sat-
isfied.
61 Kollmorgen™ | March 30, 2012