AKD BASIC User Guide | 4 Quick Reference: Parameters, Functions, Operators
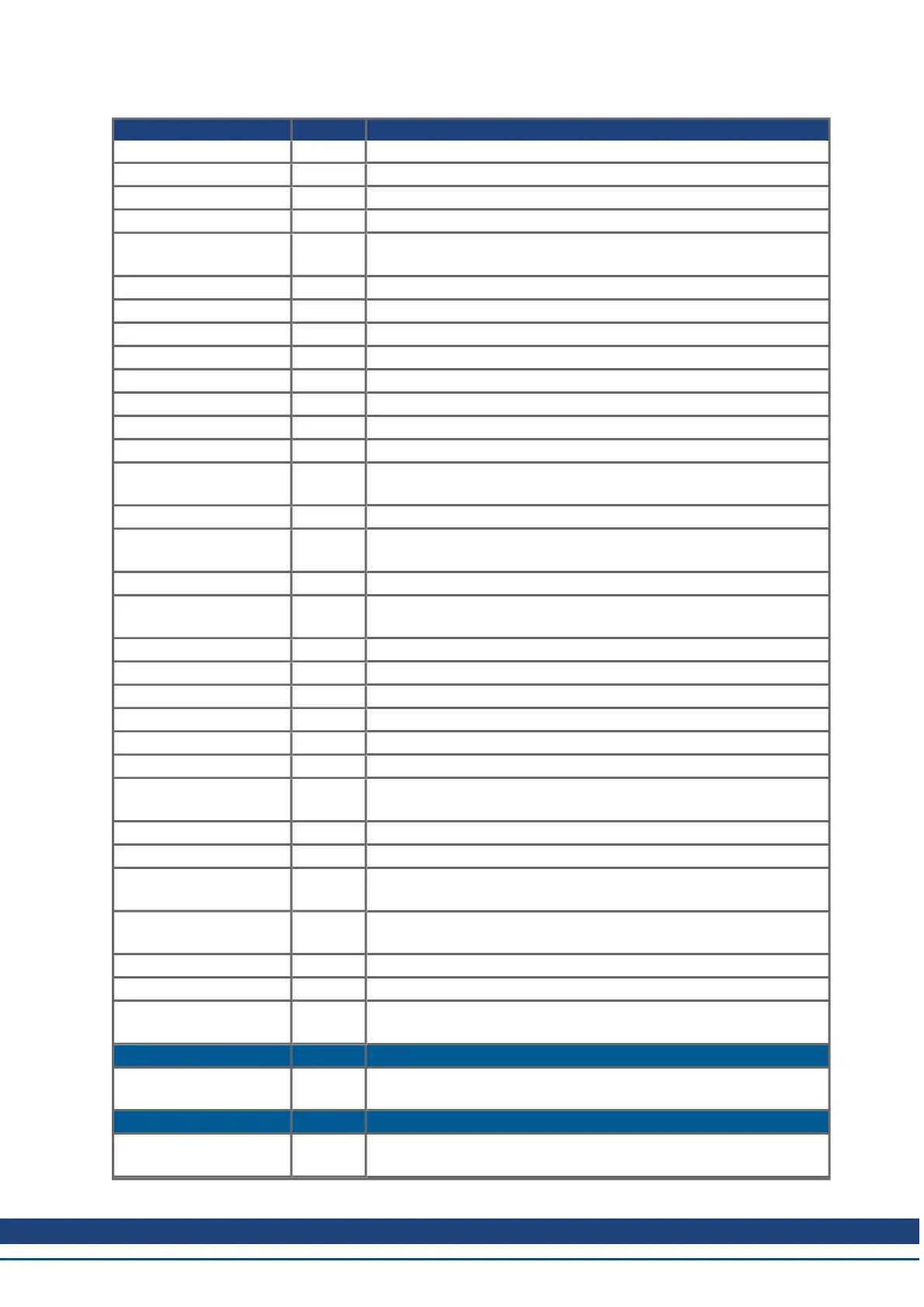
Parameter or Command Type Description
DRV.ACTIVE R/O Reads the enable status of an axis.
DRV.BLINKDISPLAY Command Causes the display to blink for 10 seconds.
DRV.CLRFAULTHIST Command Clears the fault history log in the NV.
DRV.CLRFAULTS Command Tries to clear all active faults in the drive.
DRV.CMDSOURCE NV Sets the command source (service, fieldbus, analog input, gearing,
digital, or Bode).
DRV.DBILIMIT NV Sets the maximum amplitude of the current for dynamic braking.
DRV.DEC NV Sets the deceleration value for the velocity loop.
DRV.DIR R/W Changes drive direction.
DRV.DIS Command Disables the axis (software).
DRV.DISSOURCES R/O Returns the possible reason for a drive disable.
DRV.DISTO R/W Sets the emergency timeout.
DRV.EMUEDIR R/W Sets the direction of the emulated encoder output (EEO) signal.
DRV.EMUEMODE R/W Sets the mode of the emulated encoder output (EEO) connector.
DRV.EMUEMTURN R/W Defines the location of the index pulse on the EEO (emulated
encoder output) when DRV.EMUEMODE=2.
DRV.EMUERES R/W Sets the resolution of the EEO (emulated encoder output).
DRV.EMUEZOFFSET R/W Sets the location of the EEO (emulated encoder output) index pulse
(when DRV.EMUEMODE=1).
DRV.EN Command Enables the axis (software).
DRV.FAULT1 to
DRV.FAULT10
R/O Location of fault codes for any active fault conditions.
DRV.HANDWHEEL R/O Reads the EEO input value.
DRV.HANDWHEELSRC NV Selects the feedback for handwheel operation.
DRV.HWENABLE R/O Status of the hardware enable .
DRV.ICONT R/O Reads the continuous rated current value.
DRV.IPEAK R/O Reads the peak rated current value.
DRV.NAME NV Sets and reads the name of the drive.
DRV.NVLOAD W/O Loads all data from the NV memory of the drive into the RAM param-
eters.
DRV.NVSAVE Command Saves the drive parameters from the RAM to the NV memory.
DRV.OPMODE NV Sets the drive operation mode (current, velocity, or position).
DRV.RSTVAR Command Sets default values in the drive without re-booting the drive and with-
out resetting the NV memory.
DRV.SETUPREQBITS R/O Reads the bitwise set status of parameters that must be set before
the drive can be enabled
DRV.STOP Command This command stops all drive motion.
DRV.TIME R/W A continuous time counter in the drive.
DRV.WARNING1 to
DRV.WARNING10
R/O Location of fault codes for any active warning conditions.
Fault (FAULT)
FAULTx.ACTION R/W Gets/Sets the Fault Action for Fault 130, 131, 132, 134, 139, 451, and
702.
Feedback 1 (FB1)
FB1.BISSBITS NV Specifies the number of Biss Sensor (Position) Bits for the BiSS
Mode C encoder in use.
Kollmorgen™ | March 30, 2012 50