AKD BASIC User Guide | 4 Quick Reference: Parameters, Functions, Operators
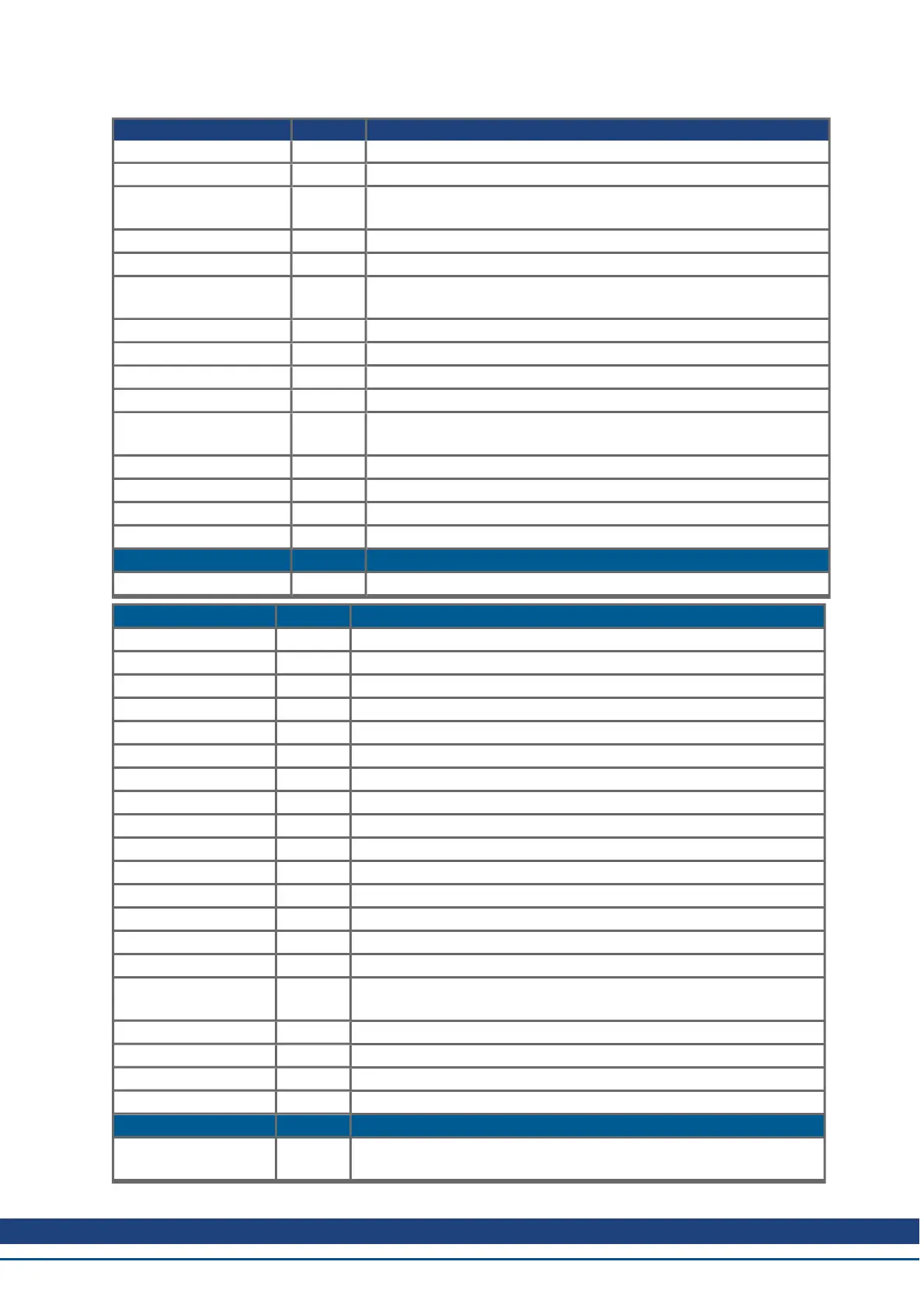
Parameter or Command Type Description
IL.FOLDWTHRESH NV Sets the foldback warning level.
IL.IFOLD R/O Reads the overall foldback current limit.
IL.IUFB R/O Reads the sigma-delta measured current in the u-winding of the
motor.
IL.IVFB R/W Sets the sigma-delta measured current in the u-winding of the motor.
IL.KP NV Sets the proportional gain of the q-component of the PI regulator.
IL.KPDRATIO NV Sets the proportional gain of the d-component current PI-regulator as
a percentage of IL.KP
IL.LIMITN NV Sets the negative user (application-specific) current limit.
IL.LIMITP NV Sets the positive user (application-specific) current limit.
IL.MFOLDD NV Sets the motor foldback maximum time at motor peak current.
IL.MFOLDR R/O Sets the motor foldback recovery time.
IL.MFOLDT NV Sets the motor foldback time constant of the exponential current drop
(foldback).
IL.MIFOLD R/O Sets the motor foldback current limit.
IL.VCMD R/O Sets the output of the q-component PI regulator.
IL.VUFB R/O Reads the measured voltage on the u-winding of the motor.
IL.VVFB R/O Reads the measured voltage on the v-winding of the motor.
LOAD Parameters
LOAD.INERTIA NV Sets the load inertia.
Motor Parameters
MOTOR.BRAKE NV Sets the presence or absence of a motor brake.
MOTOR.BRAKERLS Command Allows a user to release the motor brake.
MOTOR.ICONT NV Sets the motor continuous current.
MOTOR.INERTIA NV Sets the motor inertia.
MOTOR.IPEAK NV Sets the motor peak current.
MOTOR.KE NV Sets the motor back EMF constant.
MOTOR.KT NV Sets the torque constant of the motor.
MOTOR.LQLL NV Sets the line-to-line motor Lq.
MOTOR.NAME NV Sets the motor name.
MOTOR.PHASE NV Sets the motor phase.
MOTOR.PITCH NV Sets the motor pitch.
MOTOR.POLES NV Sets the number of motor poles.
MOTOR.R NV Sets the stator winding resistance phase-phase in ohms.
MOTOR.TBRAKEAPP NV The delay time used for applying the motor brake.
MOTOR.TBRAKERLS NV The delay time used for releasing the motor brake.
MOTOR.TEMP R/O Reads the motor temperature represented as the resistance of the
motor PTC.
MOTOR.TEMPFAULT NV Sets the motor temperature fault level.
MOTOR.TEMPWARN NV Sets the motor temperature warning level.
MOTOR.TYPE NV Sets the motor type.
MOTOR.VOLTMAX NV Sets the motor maximum voltage.
Position Loop (PL)
PL.CMD NV Reads the position command directly from the entry to the position
loop.
Kollmorgen™ | March 30, 2012 52