RM0016 Controller area network (beCAN)
Doc ID 14587 Rev 8 383/449
SOF = Start Of Frame; ID = Identifier; RTR = Remote Transmission Request; IDE = Identifier Extension;
r0, r1 = Reserved bits; DLC = Data Length Code; CRC = Cyclic Redundancy Code;
Error flag: 6 dominant bits if node is error active else 6 recessive bits.
Suspend transmission: applies to error passive nodes only.
EOF = End of Frame
ACK = Acknowledge bit (send as recessive)
Ctrl = Control
23.7 Interrupts
Two interrupt vectors are dedicated to beCAN. Each interrupt source can be independently
enabled or disabled by means of the CAN Interrupt Enable Register (CAN_IER) and CAN
Error Interrupt Enable register (CAN_EIER).
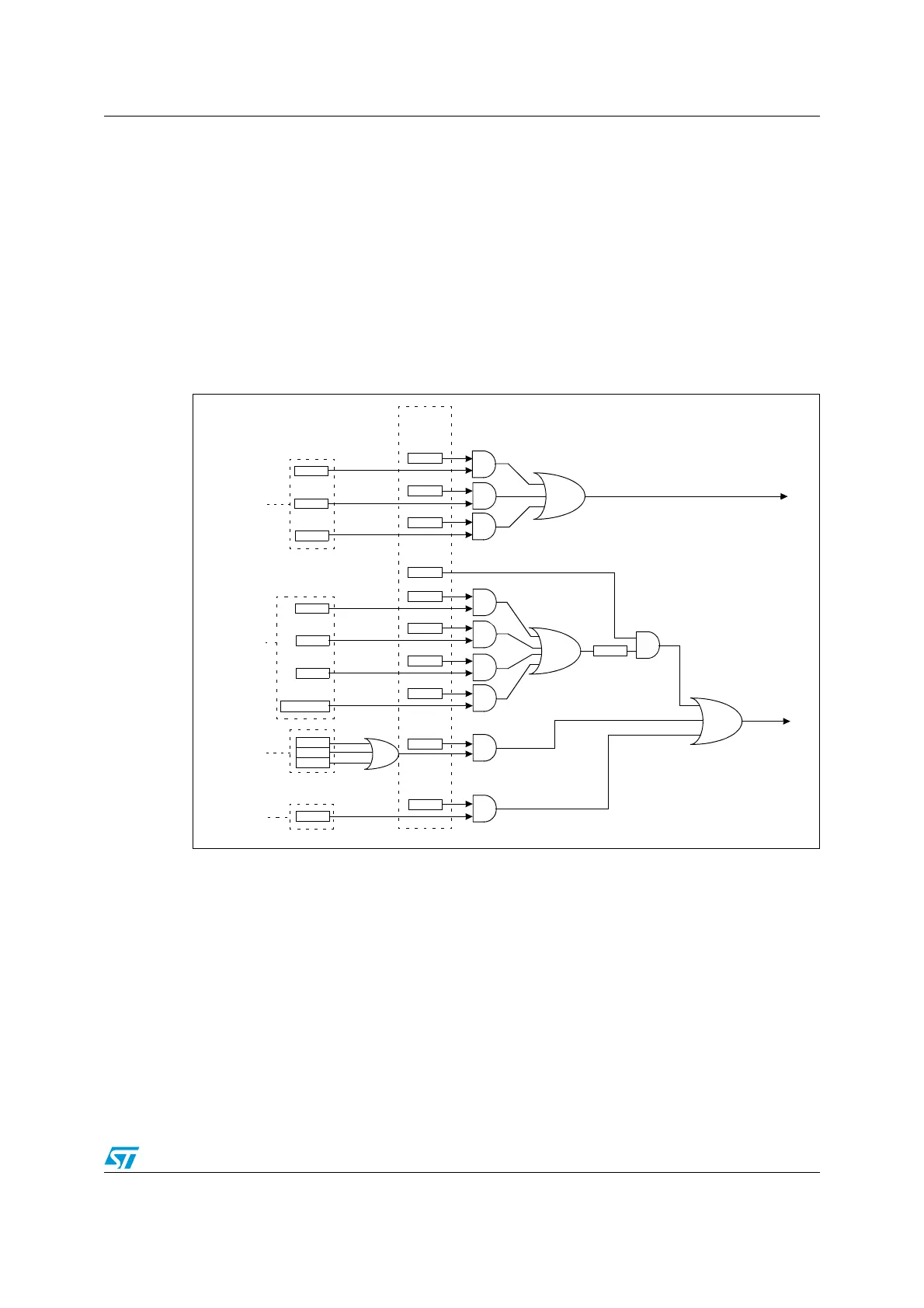
Figure 155. Event flags and interrupt generation
● The FIFO interrupt can be generated by the following events:
– Reception of a new message, FMP bits in the CAN_RFR register incremented.
– FIFO full condition, FULL bit in the CAN_RFR register set.
– FIFO overrun condition, FOVR bit in the CAN_RFR register set.
● The transmit, error and status change interrupt can be generated by the following
events:
– Transmit mailbox 0 becomes empty, RQCP0 bit in the CAN_TSR register set.
– Transmit mailbox 1 becomes empty, RQCP1 bit in the CAN_TSR register set.
– Transmit mailbox 2 becomes empty, RQCP2 bit in the CAN_TSR register set.
– Error condition, for more details on error conditions please refer to the CAN Error
Status register (CAN_ESR).
– Wakeup condition, SOF monitored on the CAN Rx signal.
RQCP0
RQCP1
CAN_TSR
TMEIE
CAN_IER
TRANSMIT/
EWGF
EWGIE
EPVF
EPVIE
BOFF
BOFIE
1 ℜ≤ LEC ℜ≤
LECIE
CAN_ESR
ERRIE
FMP
FMPIE
FULL
FFIE
FOVR
FOVIE
CAN_RFR
FIFO
INTERRUPT
RQCP2
WKUI
WKUIE
CAN_MSR
INTERRUPT
ERROR
STATUS CHANGE/
ERRI
CAN_MSR
CAN_EIER

 Loading...
Loading...







