3 Teaching
3.4 Modifying Steps
3-35
155507-1CD
RE-CSO-A037
DX100
TEACHING CONDITION window.
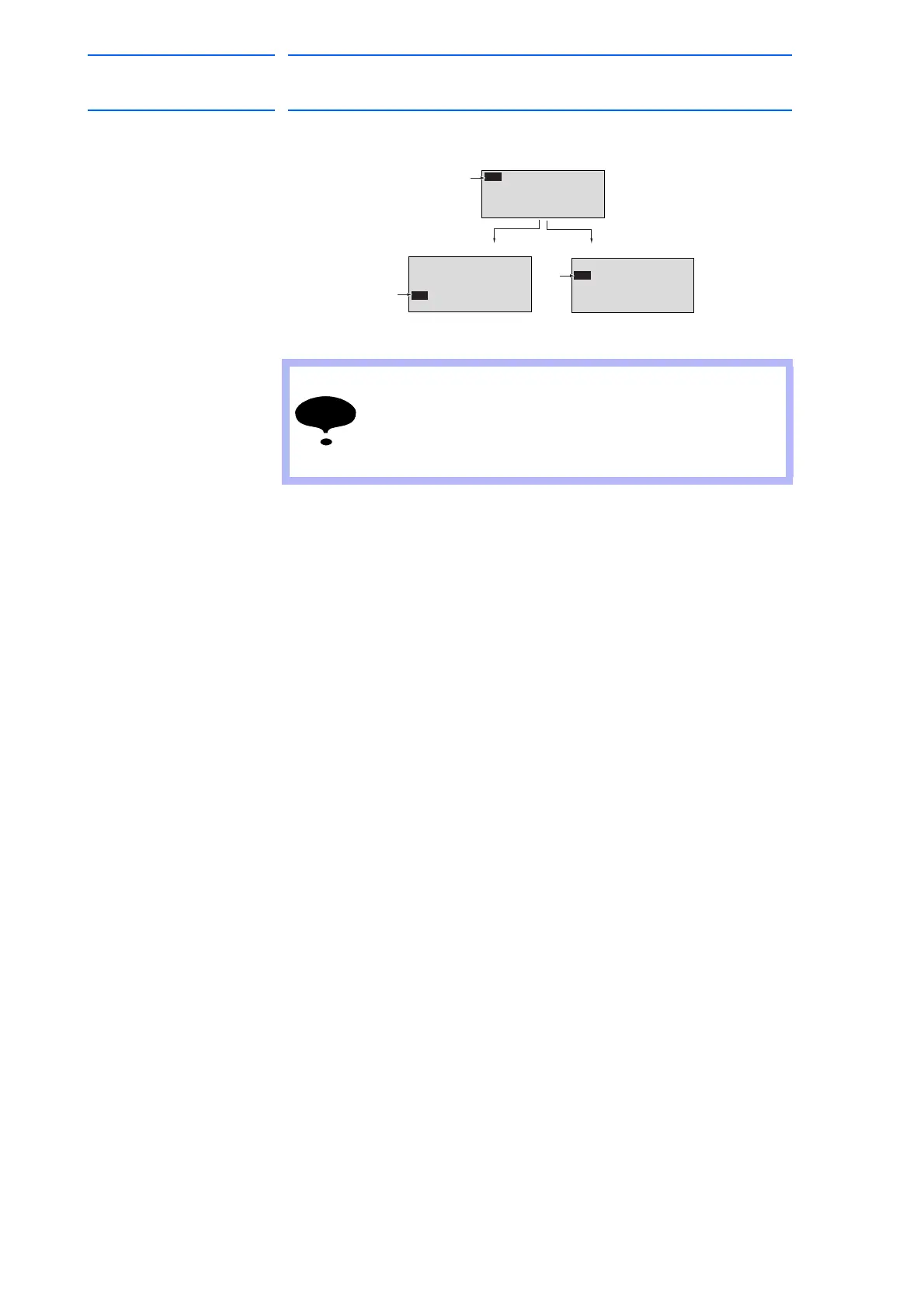
Positions where the move instructions are inserted.
The default location for insertions is “before the next step”,
but it is also possible to insert “after the cursor line”. This
setting is made in the “Move Instruction Register Method” in
the TEACHING CONDITION window.
0006 MOVL V=276
0007 TIMER T=1.00
0008 DOUT OT#(1) ON
0009 MOVL V=558
0010 MOVJ VJ=100.0
Added
instruction
0006 MOVL V=276
0007 MOVL V=558
0008 TIMER T=1.00
0009 DOUT OT#(1) ON
0010 MOVJ VJ=100.0
Added
instruction
Before inserting the move instruction
After the insertion: when inserting before the next step After the insertion: when inserting after the cursor line
0006 MOVL V=276
0007 TIMER T=1.00
0008 DOUT OT#(1) ON
0009 MOVJ VJ=100.0
Cursor line

 Loading...
Loading...









