9-4
155507-1CD
RE-CSO-A037
DX100
9 General Purpose Application
9.1 Simplified Teaching and Playback
9.1.1.2 Teaching Procedure
To playback the manipulator, the instruction to move the manipulator must
be written in a job. This instruction is called a move instruction. The
destination position, the interpolation method, the play speed, etc. are
registered in the move instruction.
Main move instructions begin with “MOV” in the INFORM III language
used by the DX100.
<Example>
MOVJ VJ=50.00
MOVL V=1122 PL=1
<Example>
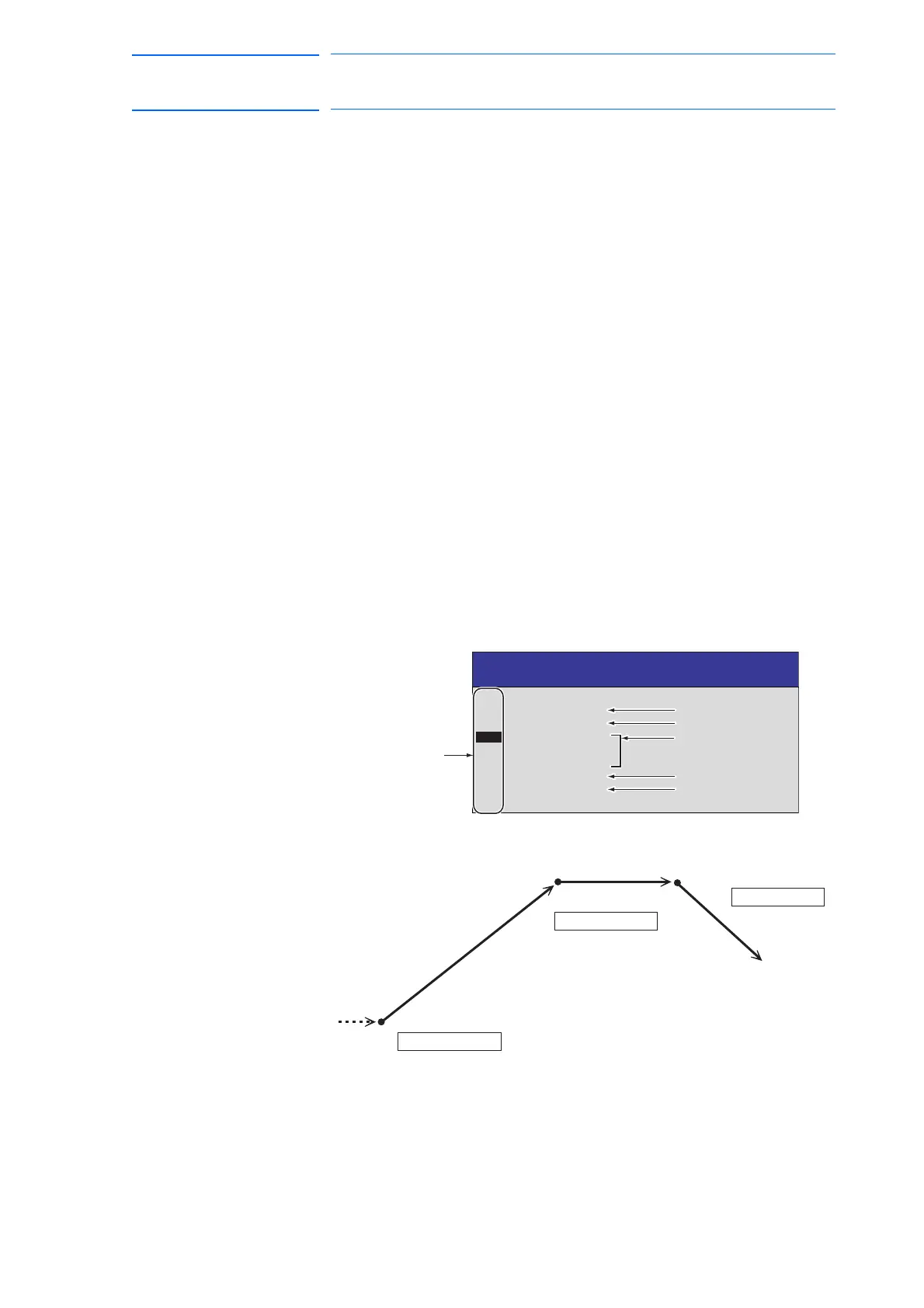
Refer to the following JOB CONTENT window. When executing playback,
the manipulator moves to the position of Step 1 with the interpolation type
and play speed registered in Step 1’s move instruction. Then, the
manipulator moves between Steps 1 and 2 with the interpolation type and
play speed registered in Step 2’s move instruction. Then, the manipulator
moves between Steps 2 and 3 with the interpolation type and play speed
registered in Step 3’s move instruction. After the manipulator reaches the
position of Step 3, the manipulator then executes the TIMER instruction
followed by the DOUT instruction, and then continues on to Step 4.
JOB CONTENT
JOB-A
0000 NOP
0001 MOVJ VJ=50.00
0002 MOVJ VJ=50.00
0003 MOVL V=1122
0004 TIMER T=5.00
0005 DOUT OT#(1) ON
0006 MOVL V=1122
0007 MOVJ VJ=50.00
0008 END
Step 1
Step 2
Step 3
Step 4
Step 5
Line number
Step 1
Step 2
Step 3
Step 4
Step 5
TOOL: 00
CONTROL GROUP: R1
STEP NO: 0003
MOVJ VJ=50.00
MOVJ VJ=50.00
Step 1
Step 2
Step 3
To Step 4
MOVL V=1122

 Loading...
Loading...









