2 Manipulator Coordinate Systems and Operations
2.3 Coordinate Systems and Axis Operation
2-6
155507-1CD
RE-CSO-A037
DX100
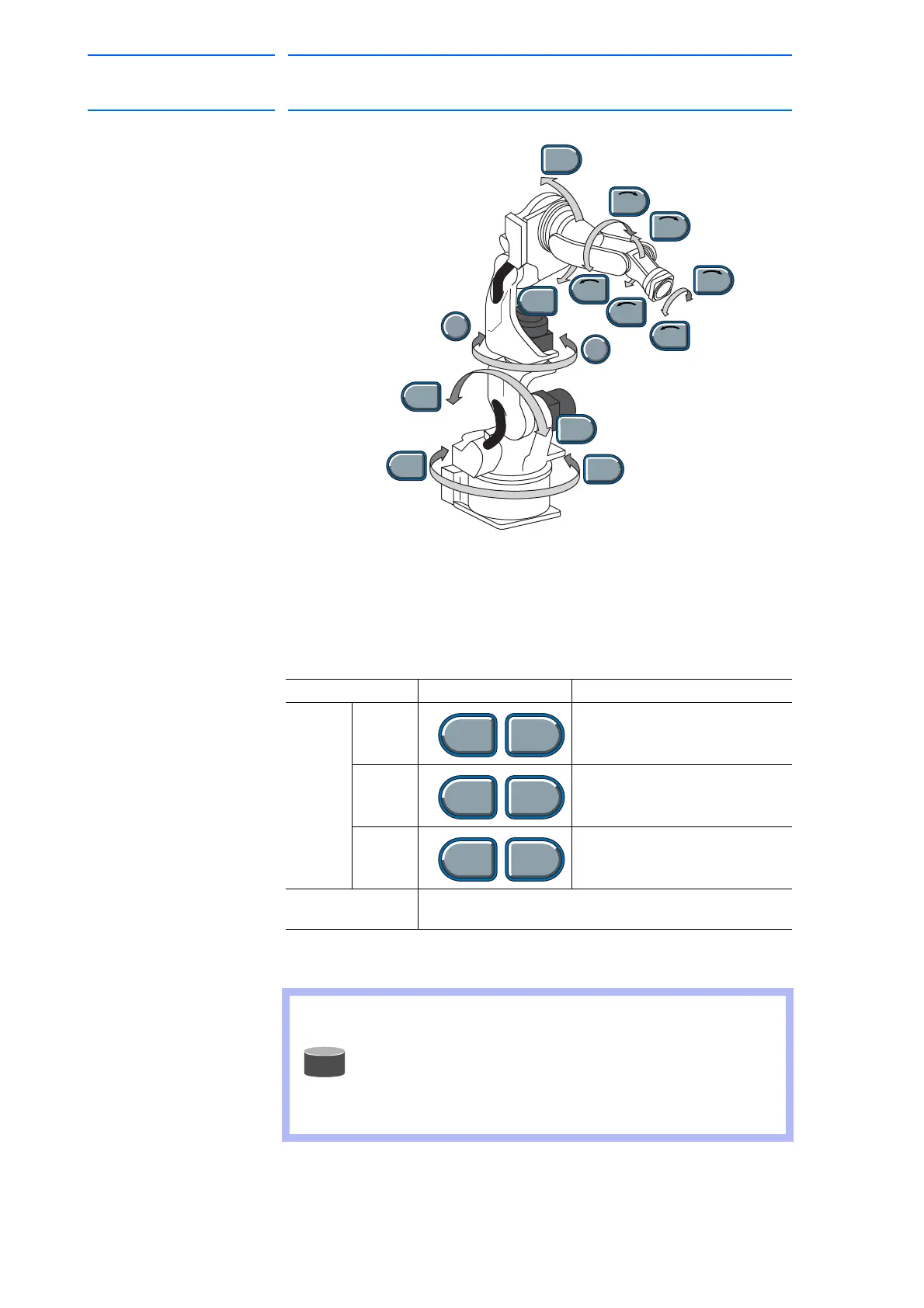
2.3.2 Cartesian Coordinates
In the cartesian coordinates, the manipulator moves parallel to the X-, Y-,
or Z-axes. The motion of each axis is described in the table below.
U-axis
R-axis
B-axis
T-axis
E-axis
L-axis
S-axis
S-
X-
S+
X+
L-
Y-
L+
Y+
U-
Z-
U+
Z+
E-
E+
R-
X-
R+
X+
B-
Y-
B+
Y+
T-
Z-
T+
Z+
Table 2-2: Axis Motion in Cartesian Coordinates
Axis Name Axis Operation Key Motion
Basic
Axes
X-axis Moves parallel to X-axis.
Y-axis Moves parallel to Y-axis.
Z-axis Moves parallel to Z-axis.
Wrist Axes Motion about TCP is executed. See section 2.3.7 “Control
Point Operation” on page 2-15.
• When two or more axis keys are pressed at the same time,
the manipulator will perform compound movement.
However, if two different directional keys (such as [X -] + [X
+]) for the same axis are pressed at the same time, the
axis will not operate.
(When [X -] + [X +] + [Y +] are pressed, only the axis
corresponding to [Y +] will operate.)

 Loading...
Loading...









