3-8
155507-1CD
RE-CSO-A037
DX100
3 Teaching
3.2 Teaching Operation
3.2.2.3 Circular Interpolation
The manipulator moves in an arc that passes through three points. When
circular interpolation is used for teaching a robot axis, the move instruction
is MOVC.
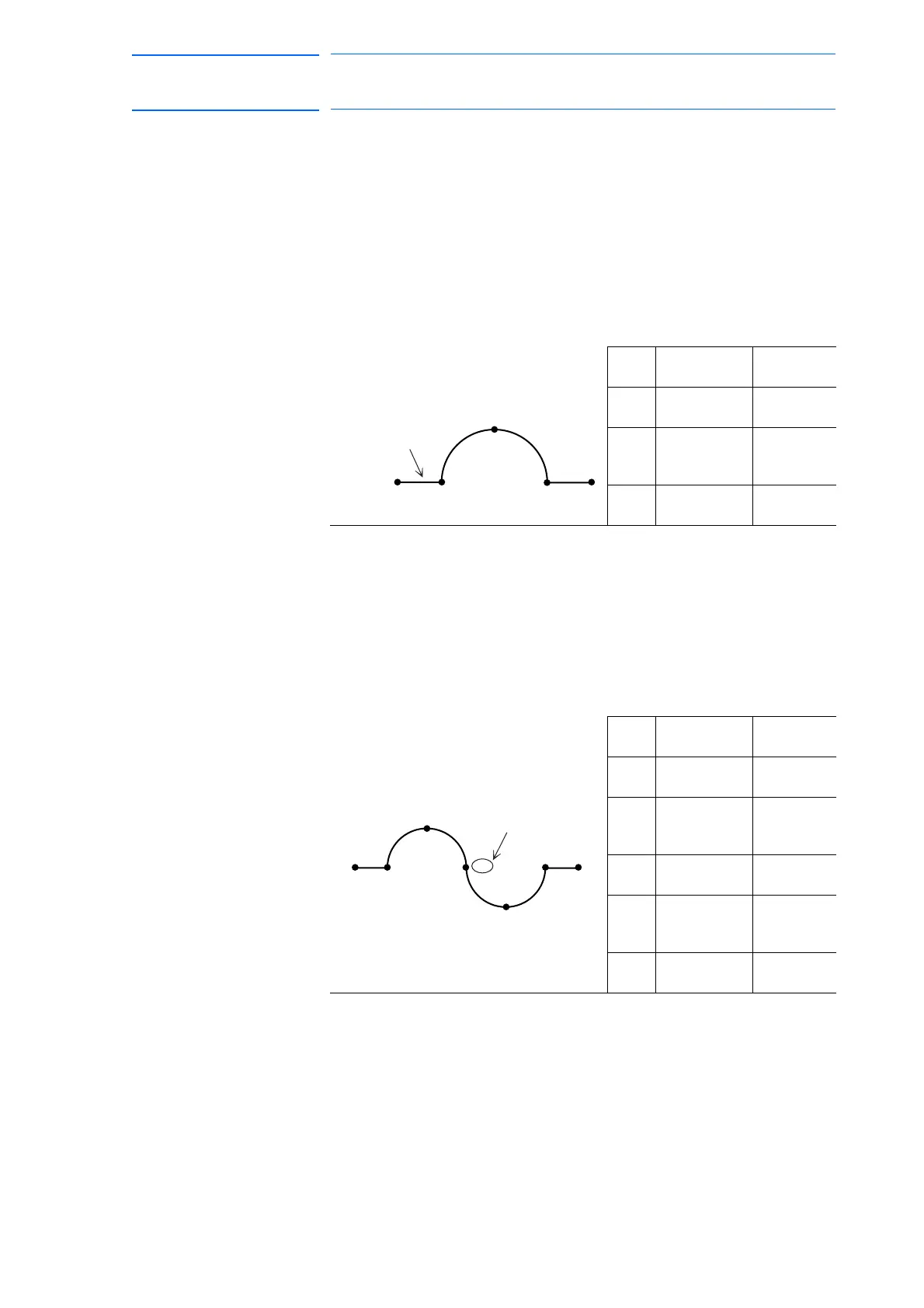
Single Circular Arc
When a single circular movement is required, teach the circular
interpolation for three points, P1 to P3, as shown in the following figure. If
joint or linear interpolation is taught at P0, the point before starting the
circular operation, the manipulator moves from P0 to P1 in a straight line.
Continuous Circular Arcs
As shown below, when two or more successive circular movements with
different curvatures are required, the movements must be separated from
each other by a joint or linear interpolation step. This step must be
inserted between the steps at an identical point. The step at the end point
of the preceding circular movement must coincide with the beginning point
of the following circular movement.
Table 3-1: Interpolation Type for Single Circular Arc
Point Interpolation
Type
Instruction
P0 Joint or
Linear
MOVJ
MOVL
P1
P2
P3
Circular MOVC
P4 Joint or
Linear
MOVJ
MOVL
P2
P3 P4P0 P1
Automatically becomes
a straight line.
Table 3-2: Interpolation Type for Continuous Circular Arcs
Point Interpolation
Type
Instruction
P0 Joint or
Linear
MOVJ
MOVL
P1
P2
P3
Circular MOVC
P4 Joint or
Linear
MOVJ
MOVL
P5
P6
P7
Circular MOVC
P8 Joint or
Linear
MOVJ
MOVL
P0 P1
P7 P8
P2
P3
P4
P5
P6
Joint or linear
motion type

 Loading...
Loading...









