2 Manipulator Coordinate Systems and Operations
2.3 Coordinate Systems and Axis Operation
2-14
155507-1CD
RE-CSO-A037
DX100
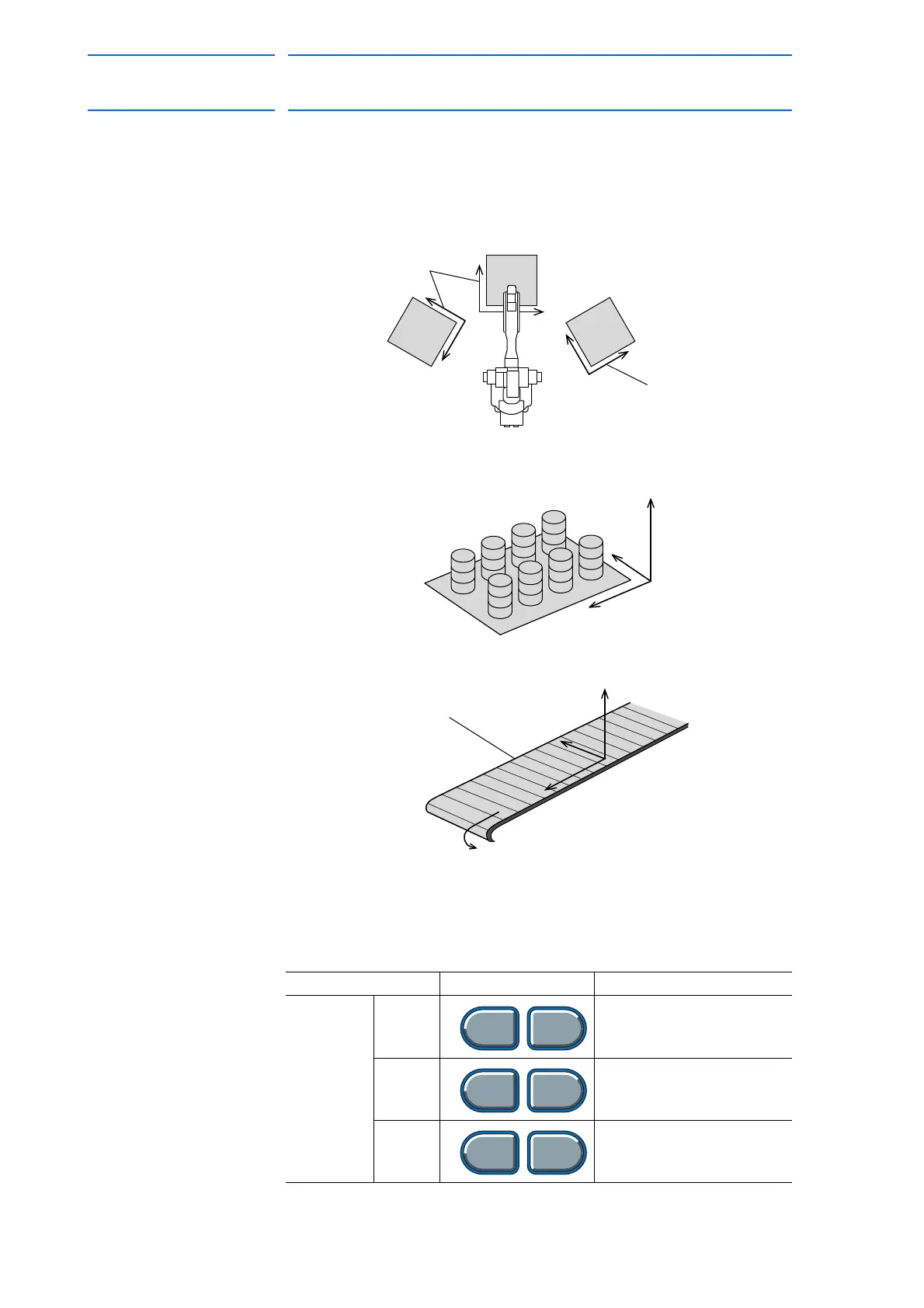
2.3.5.2 Examples of User Coordinate Utilization
The user coordinate settings allow easy teaching in various situations.
For example:
• When multiple positioners are used,
manual operation can be simplified by setting the user coordinates
for each fixture.
• When performing arranging or stacking operations,
the incremental value for shift can be easily programmed by setting
user coordinates on a pallet.
• When performing conveyor tracking operations,
the moving direction of the conveyor is specified.
2.3.6 External Axis
The external axis can be operated by selecting “BASE” or “STATION” for
the control group. The motion of each axis is described in the table below.
User coordinates
Fixture
Fixture
Fixture
User coordinates
Axis Name Axis Operation Key Motion
BASE or
STATION
1st axis The 1st axis moves.
2nd axis The 2nd axis moves.
3rd axis The 3rd axis moves.

 Loading...
Loading...









