6-61
155507-1CD
RE-CSO-A037
DX100
6 Convenient Functions
6.6 Mirror Shift Function
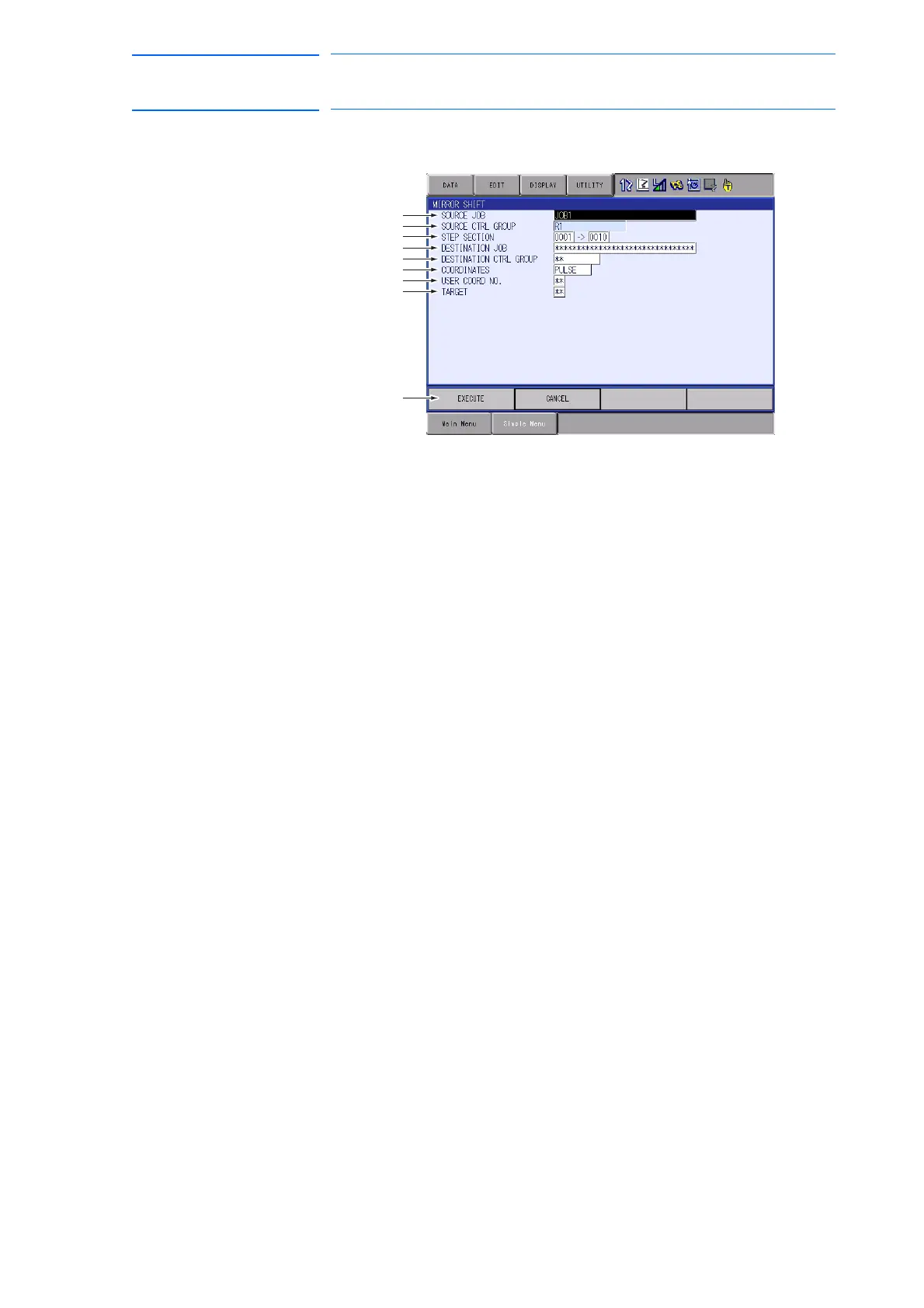
6.6.6.3 Explanation of the Mirror Shift Window
A. SOURCE JOB
Selects the conversion source job.
To select another job to be converted, move the cursor to the name and
press [SELECT] to call up the list of jobs. Select the desired job and
press [SELECT].
B. SOURCE CTRL GROUP
Displays the control group of the conversion source job.
C. STEP SELECTION
Specifies the steps to be converted. From the first step to the last step
of the selected job are specified as initial value.
D. DESTINATION JOB
Specifies the converted job name. To enter the name, move the cursor
to the name and press [SELECT]. The name of the conversion source
job is displayed in the input line as initial value. When "***" is displayed,
the name for the converted job is to be the same as that of the
conversion source job.
E. DEST CTRL GROUP
Selects the control group for the converted job. When the destination
job name is entered, the same control group as the conversion source
job is automatically set. To change it, move the cursor to the control
group and press [SELECT] to call up the selection dialog box.
F. COORDINATES
Specifies the coordinates used for conversion.
"PULSE": Executes the pulse mirror-shift conversion.
"ROBOT": Executes the mirror-shift conversion on the basis of the
cartesian coordinates.
"USER": Executes the mirror-shift conversion on the basis of the
specified user coordinates.

 Loading...
Loading...









