6-57
155507-1CD
RE-CSO-A037
DX100
6 Convenient Functions
6.6 Mirror Shift Function
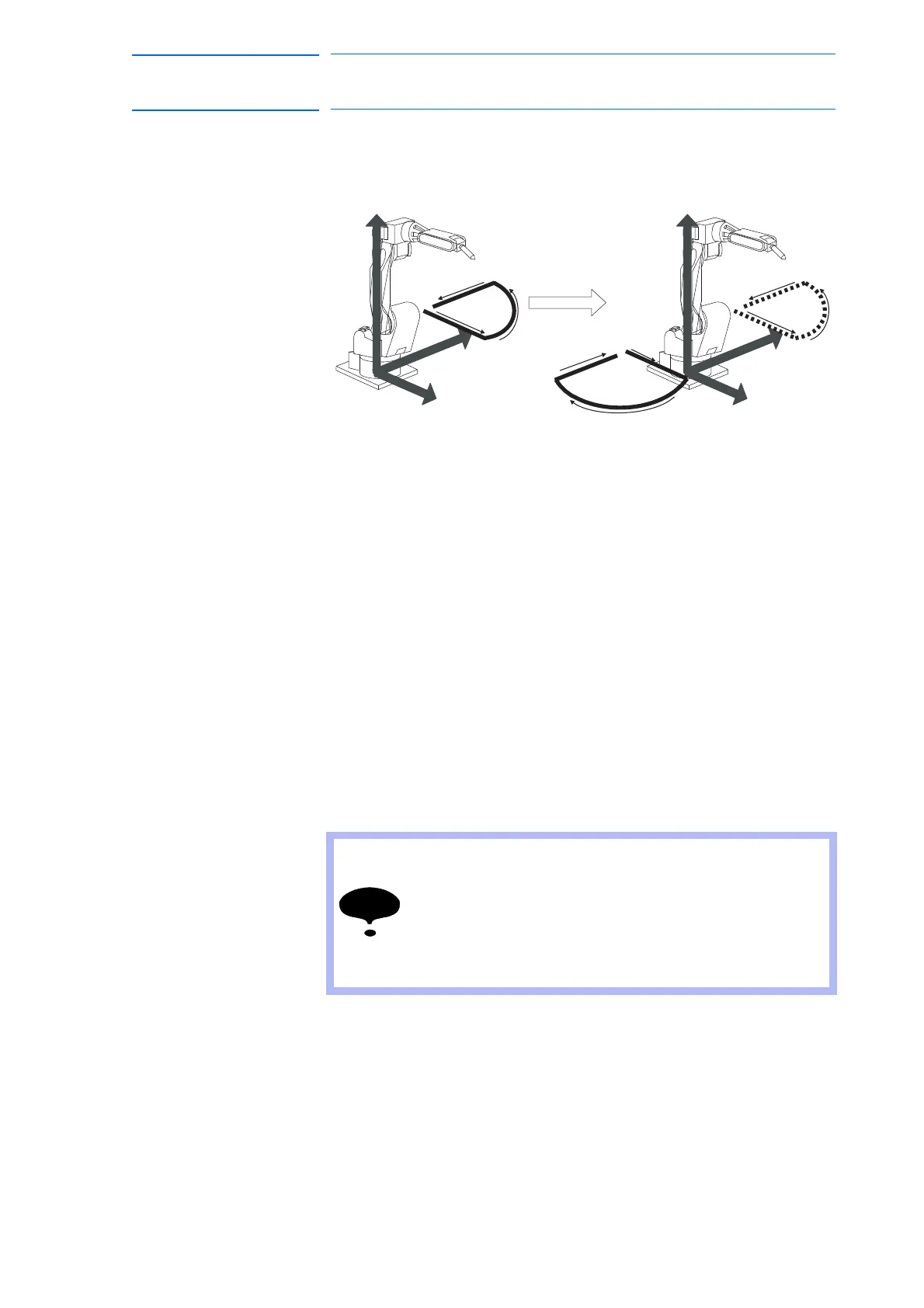
6.6.3 Robot-coordinates Mirror-shift Function
With the robot-coordinates mirror-shift function, the mirror shift is
performed on the X-Z coordinate of the robot coordinates.
6.6.3.1 Object Job
Jobs without group axes cannot be converted.
6.6.3.2 Group Axes Specification
When specifying the group axes for the converted job in a multiple group
axes system, the group axes specified in the original and converted jobs
must be the same.
• Robot Axis: Same model
• Base Axis: Same configuration
• Station Axis: Same configuration
6.6.3.3 Position Variables
Position variables are not converted by the mirror shift function.
• Mirror shift conversion for the base axis is not performed
with the robot-coordinates mirror shift function.
• With the robot-coordinates mirror shift function, mirror shift
conversion for the station axis is performed by reversing
the sign for the axes specified with the parameter
S1CxG065 "Mirror Shift Sign Reversing Axis
Specification" .

 Loading...
Loading...









