8 Parameter
8.2 Motion Speed Setting Parameters
8-9
155507-1CD
RE-CSO-A037
DX100
When emergency stop is applied during high-speed motion, the deviated
position differs from the robot current value (reference) position and
feedback position as shown in the following.
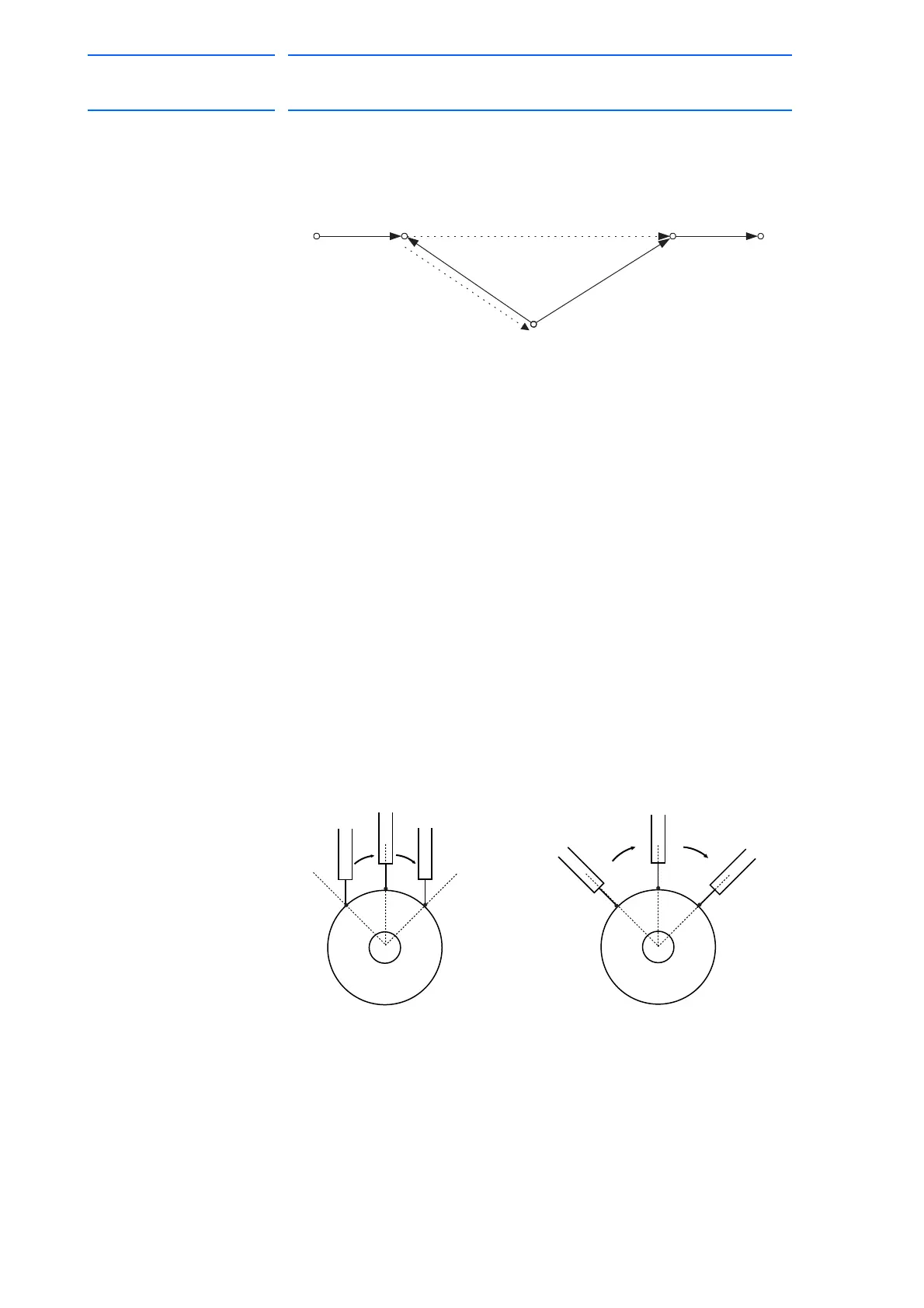
8.2.0.19 S2C425: CIRCULAR INTERPOLATION TOOL POSITION CONTROL
This parameter selects tool position control methods at circular
interpolation operation.
8.2.0.20 S2C653: EMERGENCY STOP CURSOR ADVANCE CONTROL
FUNCTION
This parameter specifies whether to use the cursor advance control
function or not.
0: Not use
1: Use
Feedback position
Current value
(reference) position
Emergency stop
0 : Fixed angle position
Interpolation is performed depending on the position change viewed from
the base coordinate.
As the figure below (left) shows, when tool position viewed from outside is
not significantly changed and that position is mainly taught at teaching, this
setting is required.
1 : Rotating position by circular arc path
Interpolation is performed depending on the position change
corresponding to circular arc path.
As the figure below (right) shows, when tool position corresponding to
circular arc path (tool position viewed from the center of the circular arc) is
not significantly changed, and that position is mainly taught at teaching,
this setting is required.
0: Fixed angle position
1: Rotating position by circular arc path
P0
P2
P1
P1
P0
P2

 Loading...
Loading...









