8-8
155507-1CD
RE-CSO-A037
DX100
8 Parameter
8.2 Motion Speed Setting Parameters
8.2.0.18 S2C424: DEVIATED POSITION
This parameter specifies whether deviated position is to be robot current
(reference) position or feedback position.
Table 8-2: S2C423
Parameter
Setting
Value
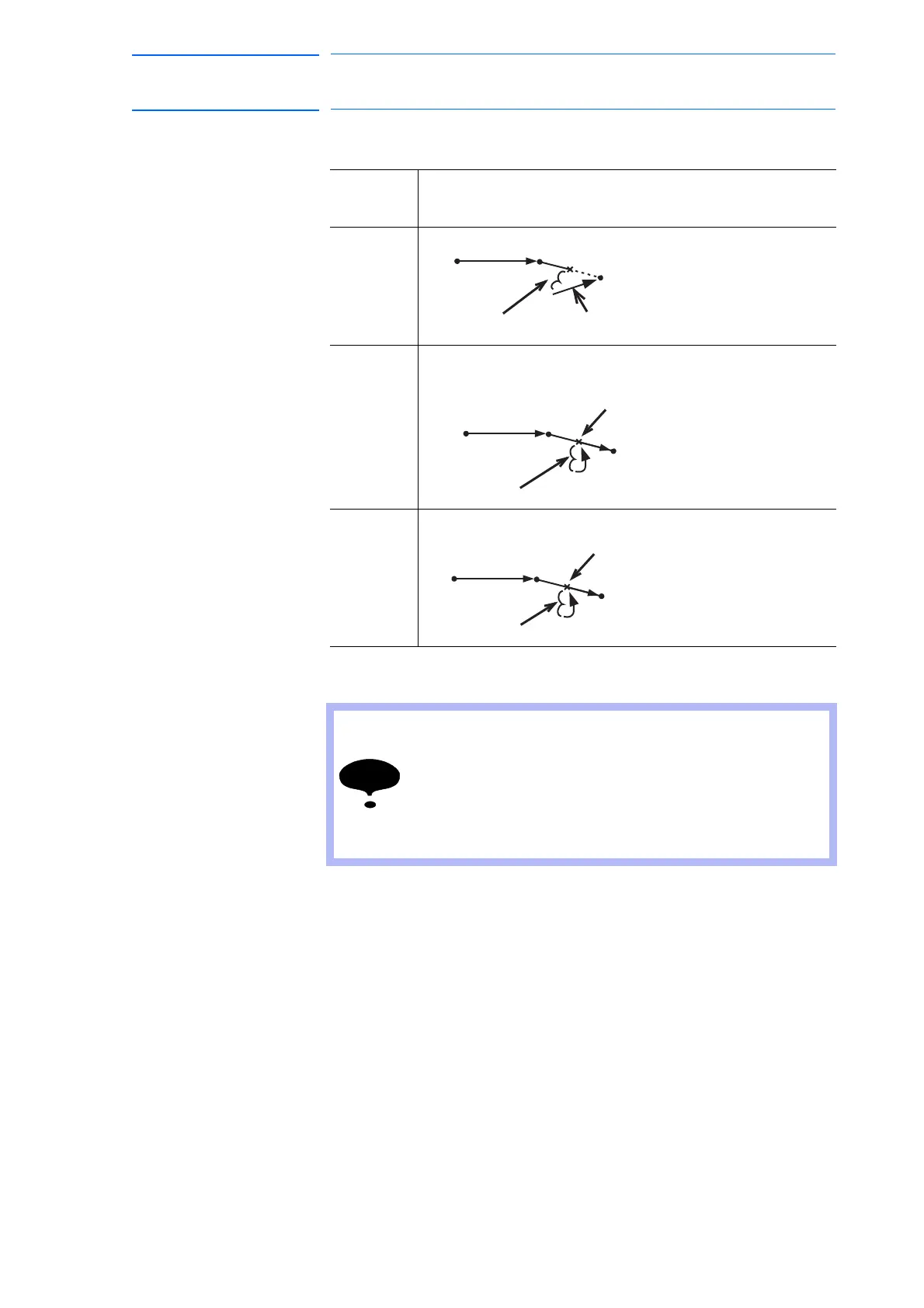
Movement When Restarting
0
Move to the next step.
1
After moving back to the deviated position, move to the indicated
step.
2
• To the path deviated position, the manipulator moves in a
straight line at low speed operation (SICxG044).
It is linear movement. After resetting from deviation, the
speed becomes the same as taught speed.
• The initial setting (prior to shipping) is 0: The manipulator
moves in a straight line from the present position to the
indicated step.
Movement
when restarting
Move to next step.
JOG
Move back to the deviated
position and then move to
the indicated step.
Emergency stop (Servo OFF)
JOG
Move back to the deviated
position and stop. When
restarting, move to the
indicated step.
Emergency stop (Servo OFF)
JOG
0 : Return to the feedback position.
1 : Return to the current value (reference) position.

 Loading...
Loading...









