3 Teaching
3.9 Other Job-editing Functions
3-85
155507-1CD
RE-CSO-A037
DX100
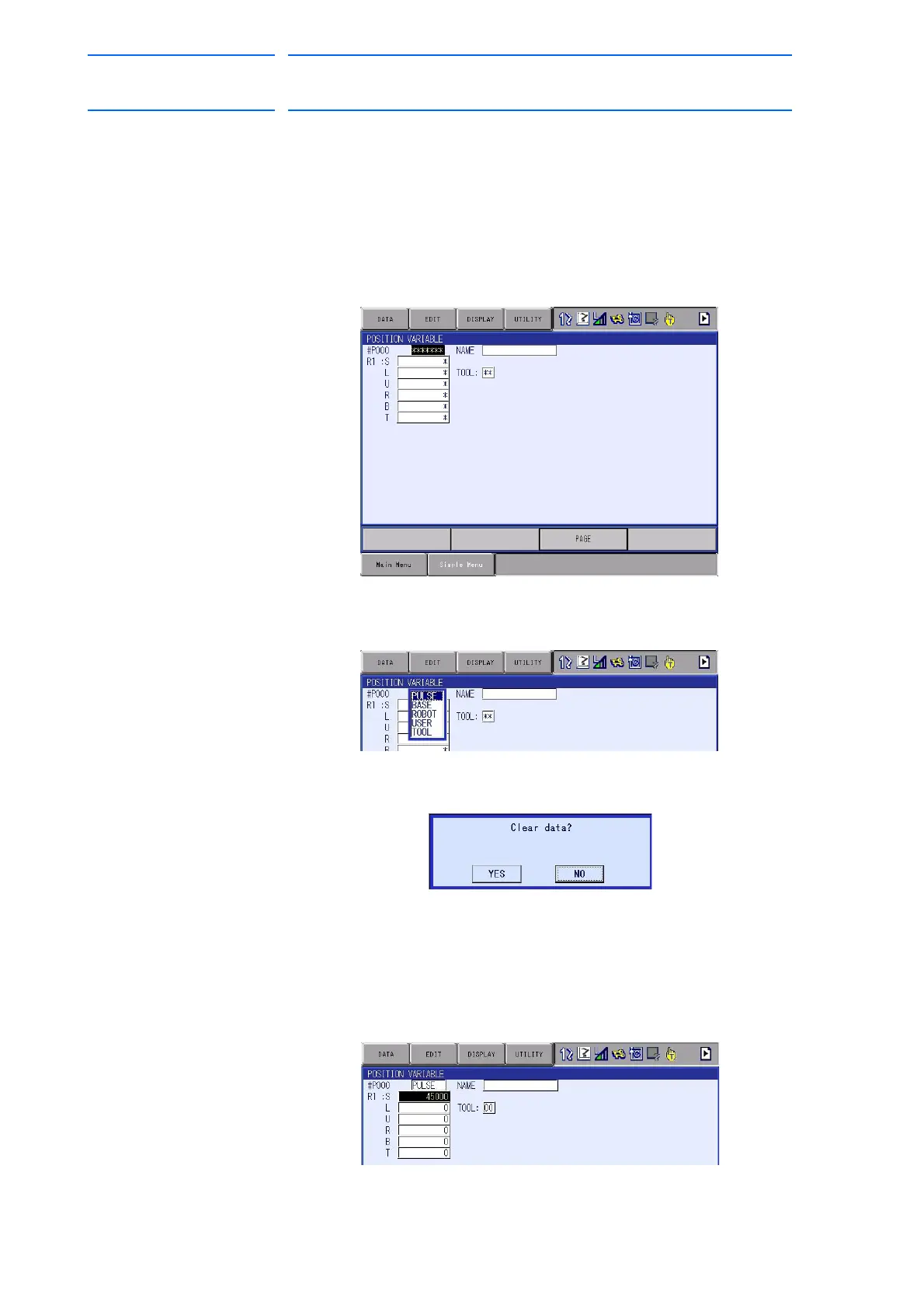
3.9.4.6 Setting Position Variables Using the Numeric Keys
Pulse Type
1. Select {VARIABLE} under the main menu.
2. Select desired position variable type.
– The desired variable window appears (robot, base, or station). (The
POSITION VARIABLE window is used for this example.)
3. Select the variable data type.
– The selection dialog box appears.
– If the position variable was set before, confirmation dialog box
appears for data clear. If “YES” is selected, the data is cleared.
4. Select {PULSE}.
5. Move the cursor to desired data to be input and press [SELECT].
6. Input the value.
7. Press [ENTER].
– The value is set in the cursor position.

 Loading...
Loading...









