8 Parameter
8.4 Parameters According to Interference Area
8-37
155507-1CD
RE-CSO-A037
DX100
8.4.0.5 S2C067 to S2C194: CUBE USING METHOD
These parameters specify the coordinates for defining the cube. If the
user coordinates are selected, also specify the user coordinate system
numbers. Set cubic area referring to the cubic interference areas shown
below.
Coordinate No.: Specify the user coordinate number when selecting “3:
User Coordinates”.
Units: 1m
Coordinate specification
0 : Pulse (axis interference)
1 : Base coordinates
2 : Robot coordinates
3 : User coordinates
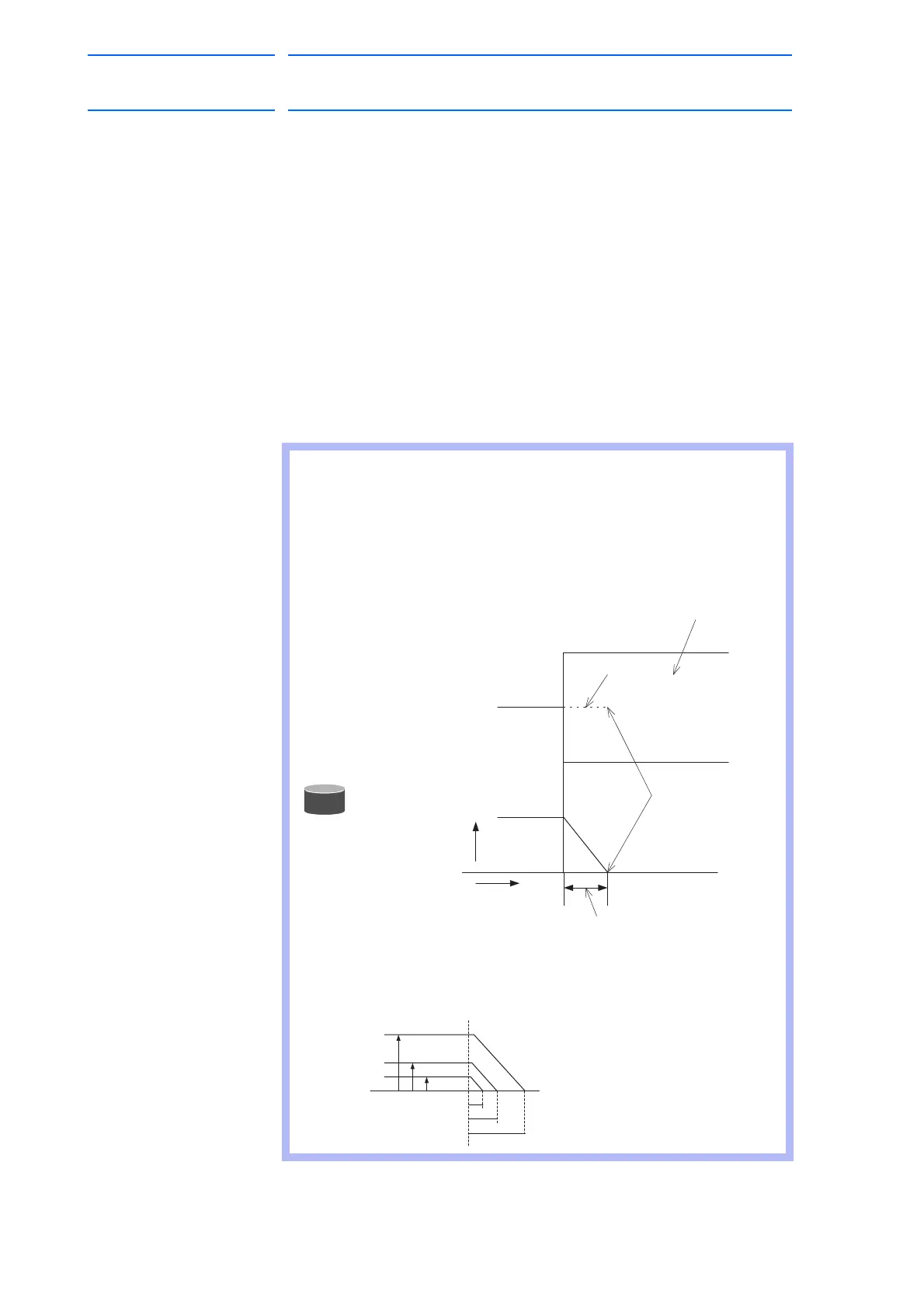
Precaution When Setting the Interference Area
It will be necessary to consider the following when setting
the cubic interference and S-axis interference areas. The
manipulator is processed to decelerate to stop from the point
where it enters in the area. Therefore, set the areas in
consideration of the amount of the manipulator movement in
the deceleration section shown in the figure below.
The move amount in the speed reduction section is
dependent on the moving speed of the manipulator at that
time:
V = 1500mm/s approx. 300mm
(Max.)
V = 1000mm/s approx. 160mm
V = 30mm/s approx. 3 to 4 mm
V = 20mm/s approx. 2mm
Stop
Deceleration
Interference area
Speed
Movement
Speed reduction section

 Loading...
Loading...









