8-36
155507-1CD
RE-CSO-A037
DX100
8 Parameter
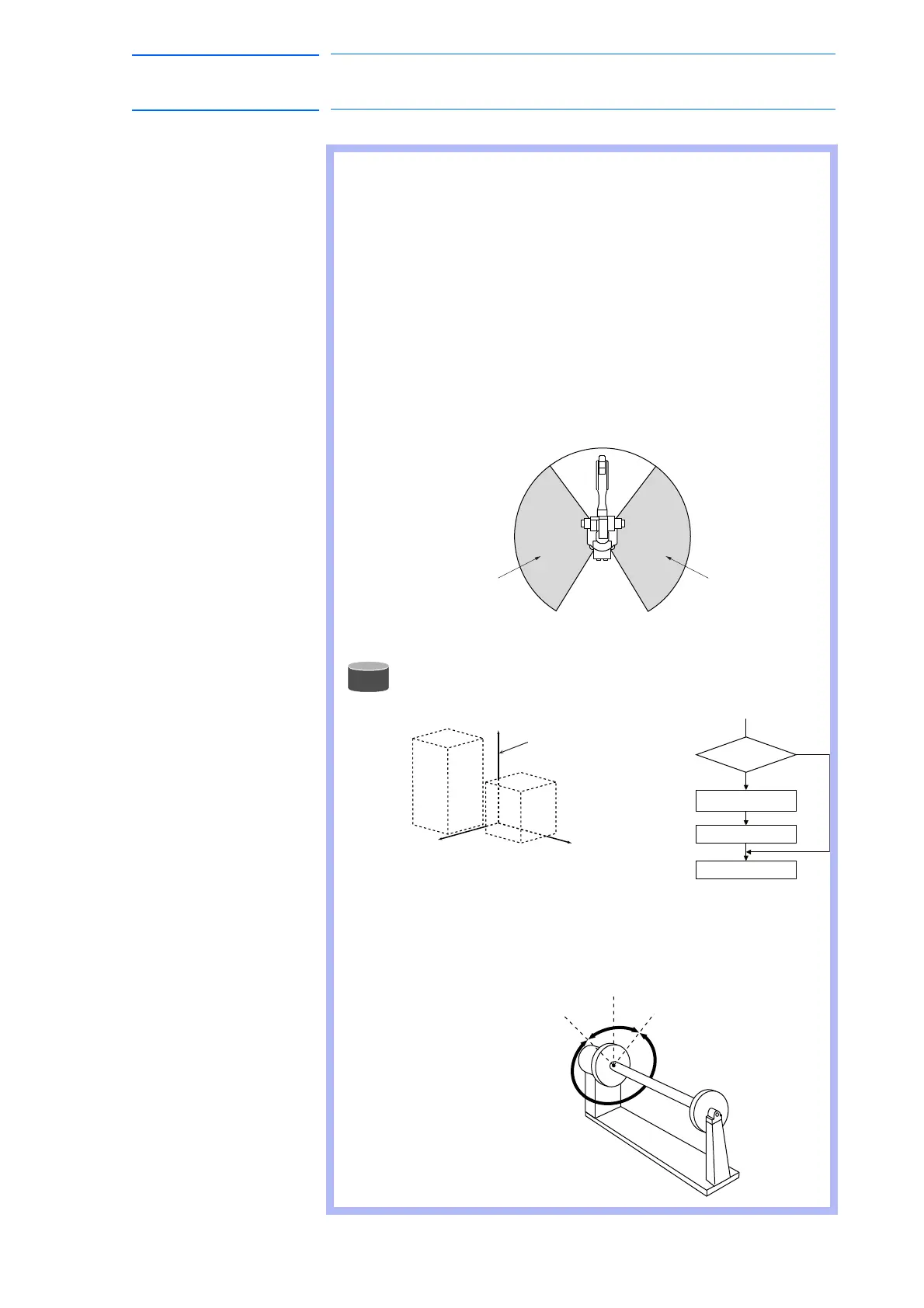
8.4 Parameters According to Interference Area
Interference Area
It is possible to output whether the TCP during operation is
inside or outside as a status signal, and to set the area to
control the position by parameters S2C003 to S2C194.
When the manipulator attempts to enter this area, the
corresponding input signal (e.g. an “entrance prohibit
signal”) is detected. The manipulator stops immediately if
there is an input signal and goes into waiting status until this
signal is cleared. This signal is processed in the I/O section.
Three methods of interference area settings are prepared for
manipulators and stations. For a system with one
manipulator, use robot 1.
• S-axis Interference Area
Position is controlled by the pulse value of the S-axis.
• Cubic Interference Area
Up to 64 cubic areas can be set. The edges of the cubes
are set parallel to the robot coordinates or the user
coordinates.
• Axis Interference Area
Up to 64 areas can be set. Each operation area maximum
and minimum value are set for the robot, base axis, and
station axis plus and minus side.
In left area
(+) side
(-) side
In right area
Base coordinates
(robot coordinates,
user coordinates)
Up to 64 cubic areas can be set,
each cube is set parallel to
the set coordinates.
Z
X
Y
S2C067-S2C194
S3C064-S3C1087
S2C003-S2C066
Cube Setting Method
Use cube
intrf. check?
No
Yes
Decide the using
method
Set the area
Complete
Max value
positive side (+)
Min value
negative side (-)
0
O
N
O
F
F

 Loading...
Loading...









