6-45
155507-1CD
RE-CSO-A037
DX100
6 Convenient Functions
6.4 Parallel Shift Job Conversion Function
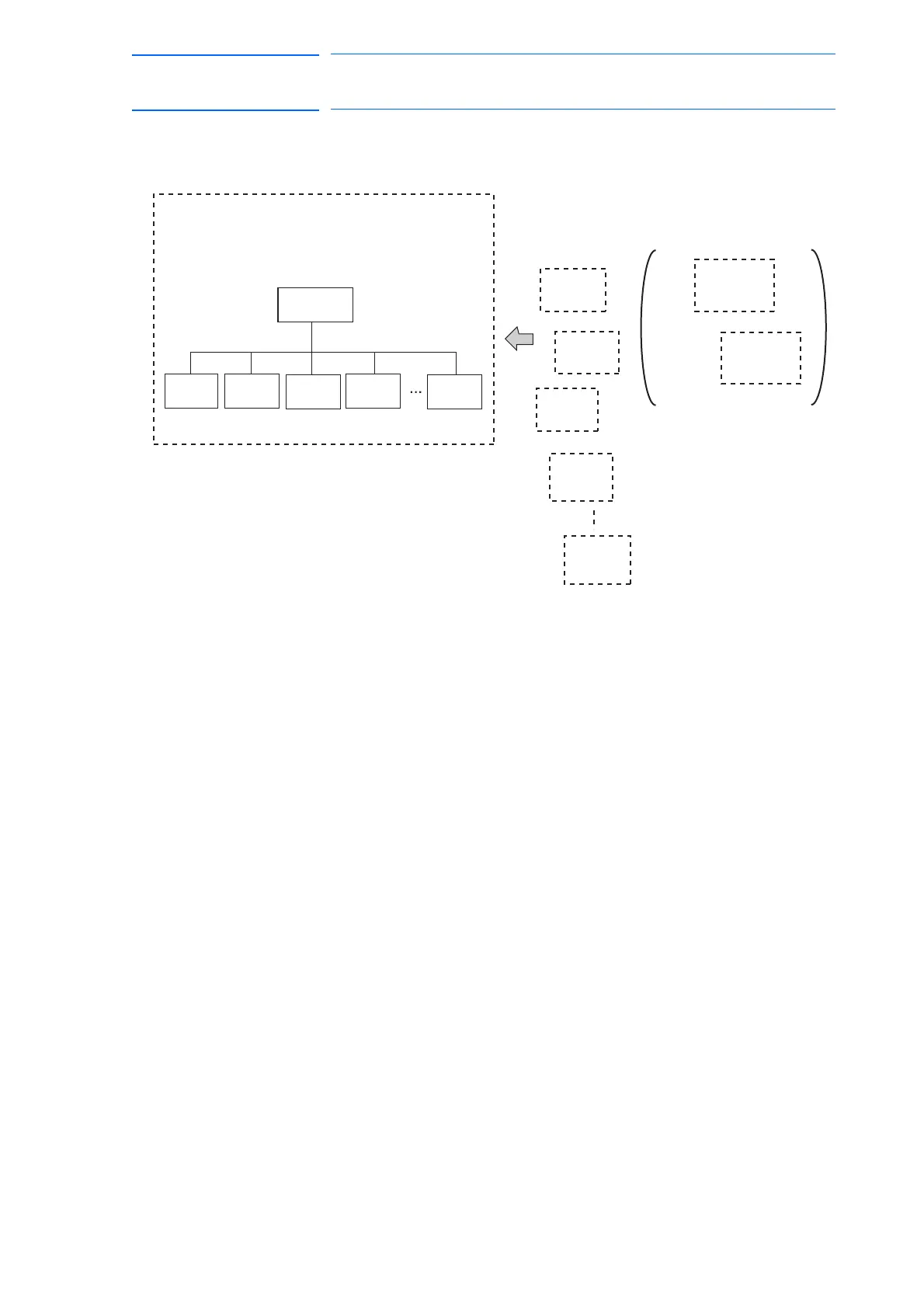
In the case of related job conversion:
• Different shift values can be set for each manipulator, base, and
station.
6.4.4.4 Operation Procedure
The following is the operation procedure for the parallel shift job
conversion using position variables.
1. Set the parameter.
– Set the parameter S2C652 (SHIFT VALUE FOR PARALLEL SHIFT
JOB CONVERSION) to 1 (Position variable shift value).
2. Set the position variable.
– Specify a position variable in advance when setting a shift value by
position variables.
– For the setting of position variables, refer to section 3.9.4 “User
Variables” on page 3-77.
3. Select {JOB} under the main menu.
4. Select {JOB}.
– The JOB CONTENT window appears.
5. Select {UTILITY} under the pull-down menu.
Job without
group axes
P001
For R1
P002
For R2
BP001
For base R1
P002
For base R2
EX001
For S1
EX002
For S1
EX0012
For S1
In a system with R1, R2, and S1 to S12:
R1 + R2 R1 R2 S1 S12
Variables

 Loading...
Loading...









