6 Convenient Functions
6.4 Parallel Shift Job Conversion Function
6-44
155507-1CD
RE-CSO-A037
DX100
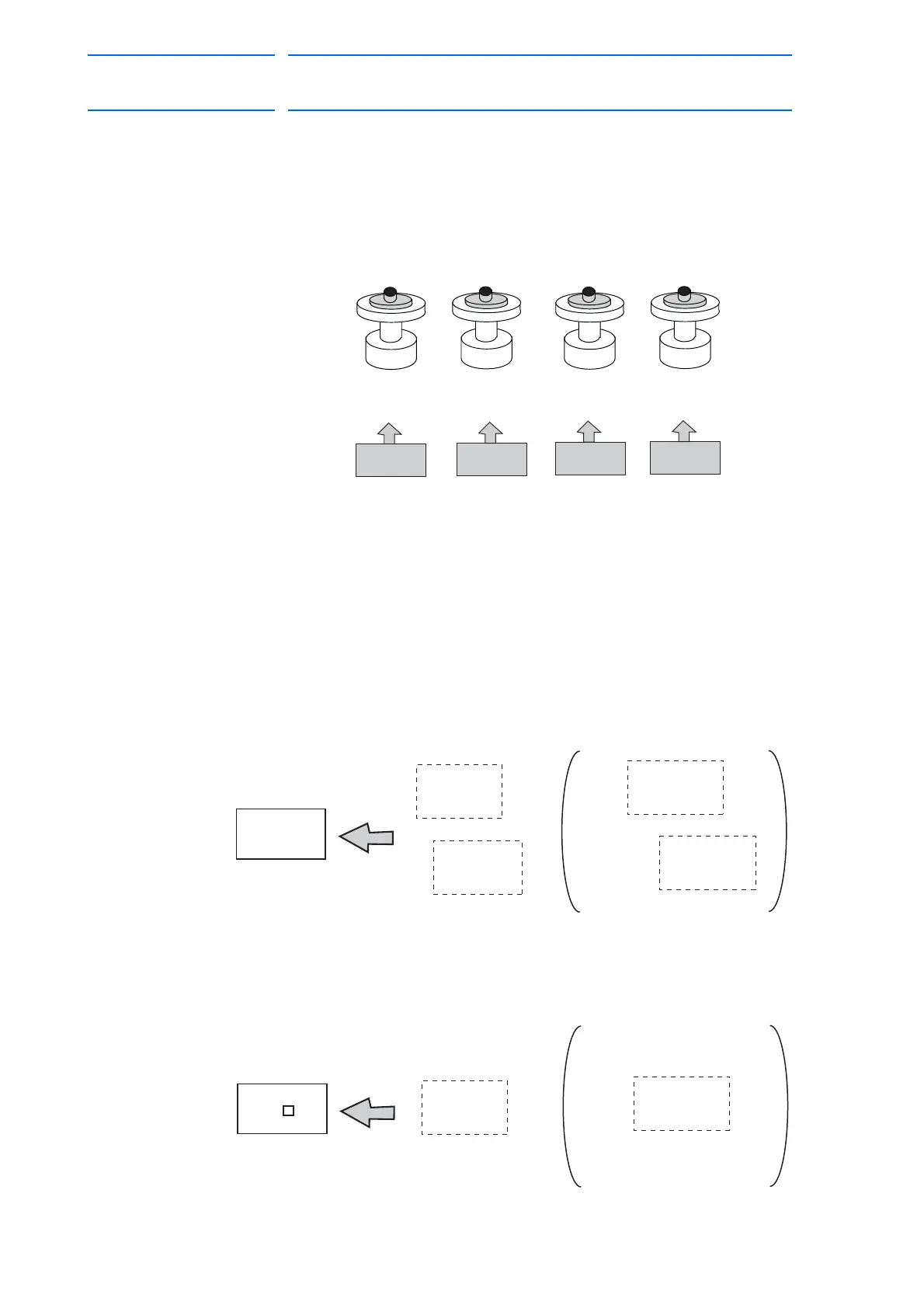
Example 2) When selecting EX005 for multiple jobs with four stations:
Use EX005 for S1.
Use EX006 for S2.
Use EX007 for S3.
Use EX008 for S4.
Relation between variables and jobs for conversion in an individual
shift
In the case of independent job conversion:
• Coordinated job with R1 + R2
Different shift values can be set for each manipulator and base.
• Job with R (+ S)
Use one variable for a job with one manipulator.
EX005
EX006
EX007
EX008
JOB S1
JOB S2 JOB S3
JOB S4
R1 + R2
P001
For R1
P002
For R2
BP001
For base R1
P002
For base R2
Variables
JOB
R
P001
For R1
BP001
For base R1
Variables
JOB

 Loading...
Loading...









