2-15
155507-1CD
RE-CSO-A037
DX100
2 Manipulator Coordinate Systems and Operations
2.3 Coordinate Systems and Axis Operation
2.3.7 Control Point Operation
Motion about TCP (Tool Center Point) can only change the wrist
orientation at a fixed TCP position in all coordinate systems except the
joint coordinates. The motion of each axis is described in the table below.
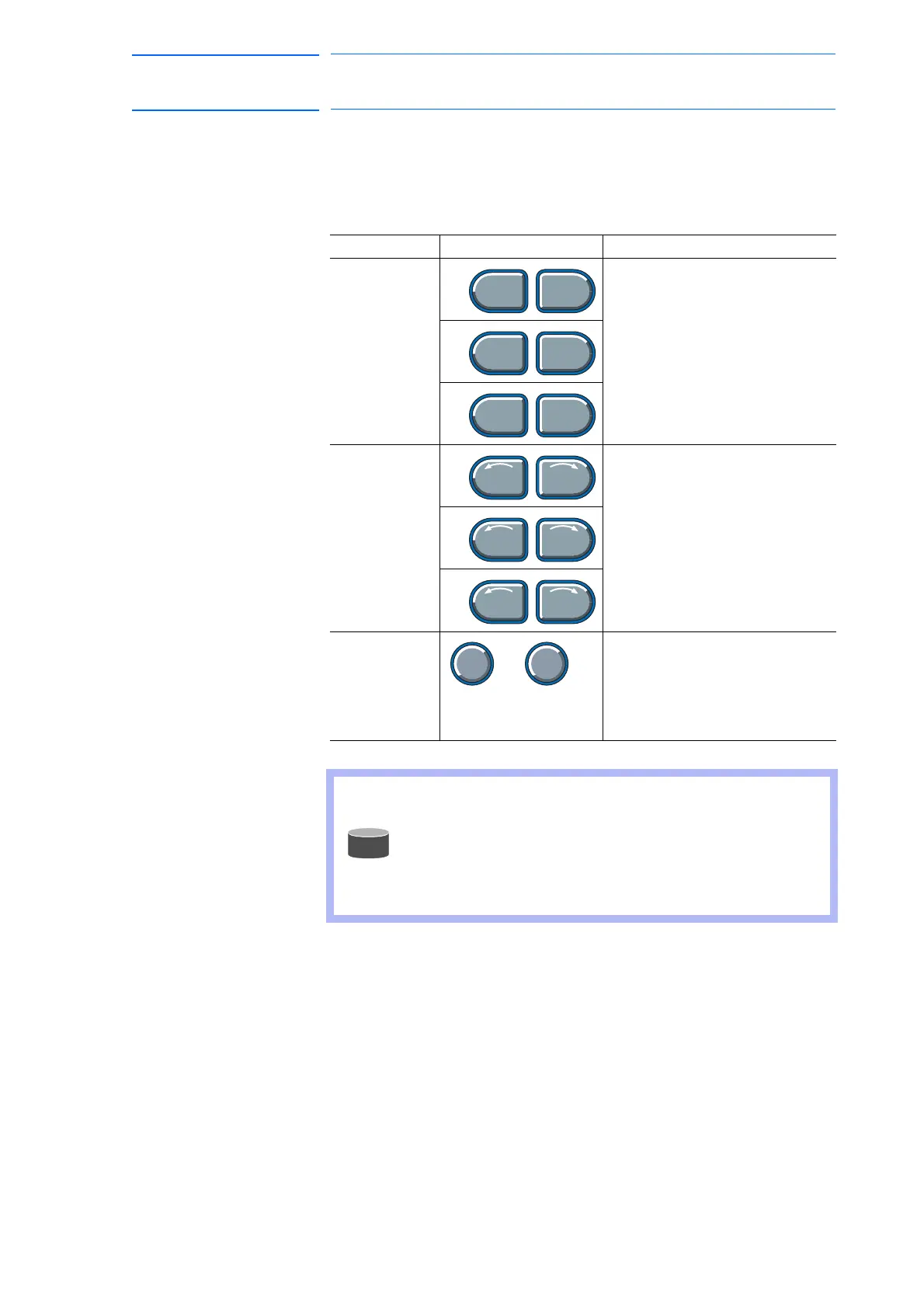
Table 2-6: Axis Motion in Motion about TCP
Axis Name Axis Operation Key Motion
Major Axes
TCP moves. These movements
differ depending on cartesian,
cylindrical, tool and user
coordinates.
Wrist Axes
Wrist axes move with the TCP
fixed. These movements differ
depending on cartesian,
cylindrical, tool and user
coordinates.
E-axis * Available only for the manipulator
with seven axes
The posture of arm changes while
the position and posture of the tool
remain fixed. (The Re degree
changes.)
• When two or more axis keys are pressed at the same time,
the manipulator will perform compound movement.
However, if two different directional keys (such as [X -] + [X
+]) for the same axis are pressed at the same time, the
axis will not operate.
(When [X -] + [X +] + [Y +] are pressed, only the axis
corresponding to [Y +] will operate.)

 Loading...
Loading...









