2-7
155507-1CD
RE-CSO-A037
DX100
2 Manipulator Coordinate Systems and Operations
2.3 Coordinate Systems and Axis Operation
2.3.3 Cylindrical Coordinates
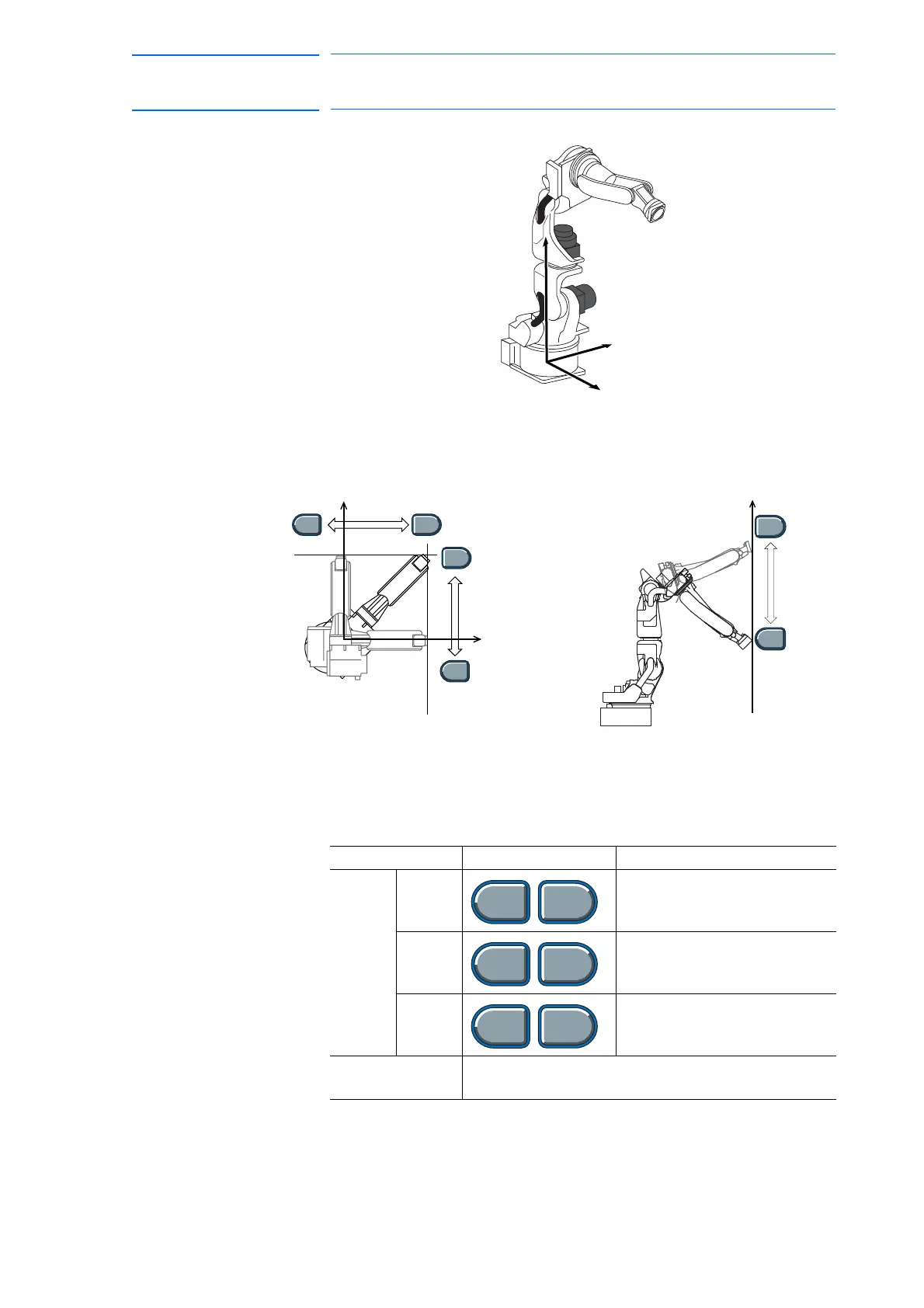
In the cylindrical coordinates, the manipulator moves as follows. The
motion of each axis is described in the table below.
Fig. 2-1: Moves parallel to X- or Y-axis Fig. 2-2: Moves parallel to Z-axis
Y-axis
X-axis
S-
X-
S+
X+
L-
Y-
L+
Y+
Table 2-3: Axis Motion in Cylindrical Coordinates
Axis Name Axis Operation Key Motion
Basic
Axes
-axis Main unit rolls around S-axis.
r-axis Moves perpendicular to Z-
axis.
Z-axis Moves parallel to Z-axis.
Wrist Axes Motion about TCP is executed. See section 2.3.7
“Control Point Operation” on page 2-15.

 Loading...
Loading...









