6 Convenient Functions
6.4 Parallel Shift Job Conversion Function
6-42
155507-1CD
RE-CSO-A037
DX100
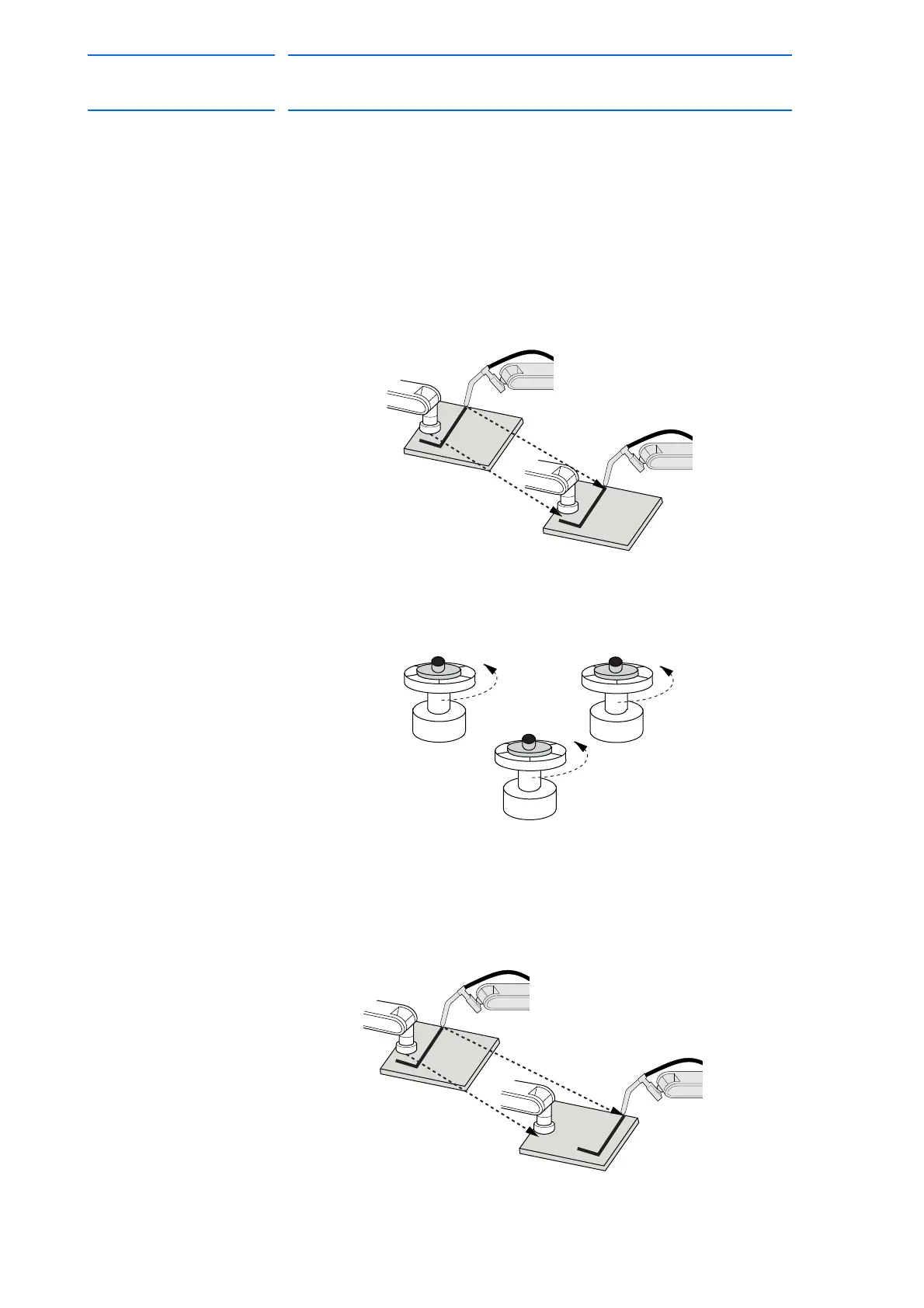
6.4.4.3 Conversion of Coordinated Jobs
There are two ways to convert a related job such as a coordinated job with
two manipulators or the system with multiple stations as described in the
following:
Common Shift
All the manipulators (or all the bases, or all the stations) are converted by
the same shift value.
Individual Shift
Each manipulator (or each base, or each station) is converted separately
by different shift values.
Coordinated job with R1+R2
The system with multiple stations
Coordinated job with R1+R2

 Loading...
Loading...









