8 Parameter
8.4 Parameters According to Interference Area
8-35
155507-1CD
RE-CSO-A037
DX100
8.4.0.4 S2C003 to S2C066: CUBE/AXIS INTERFERENCE CHECK
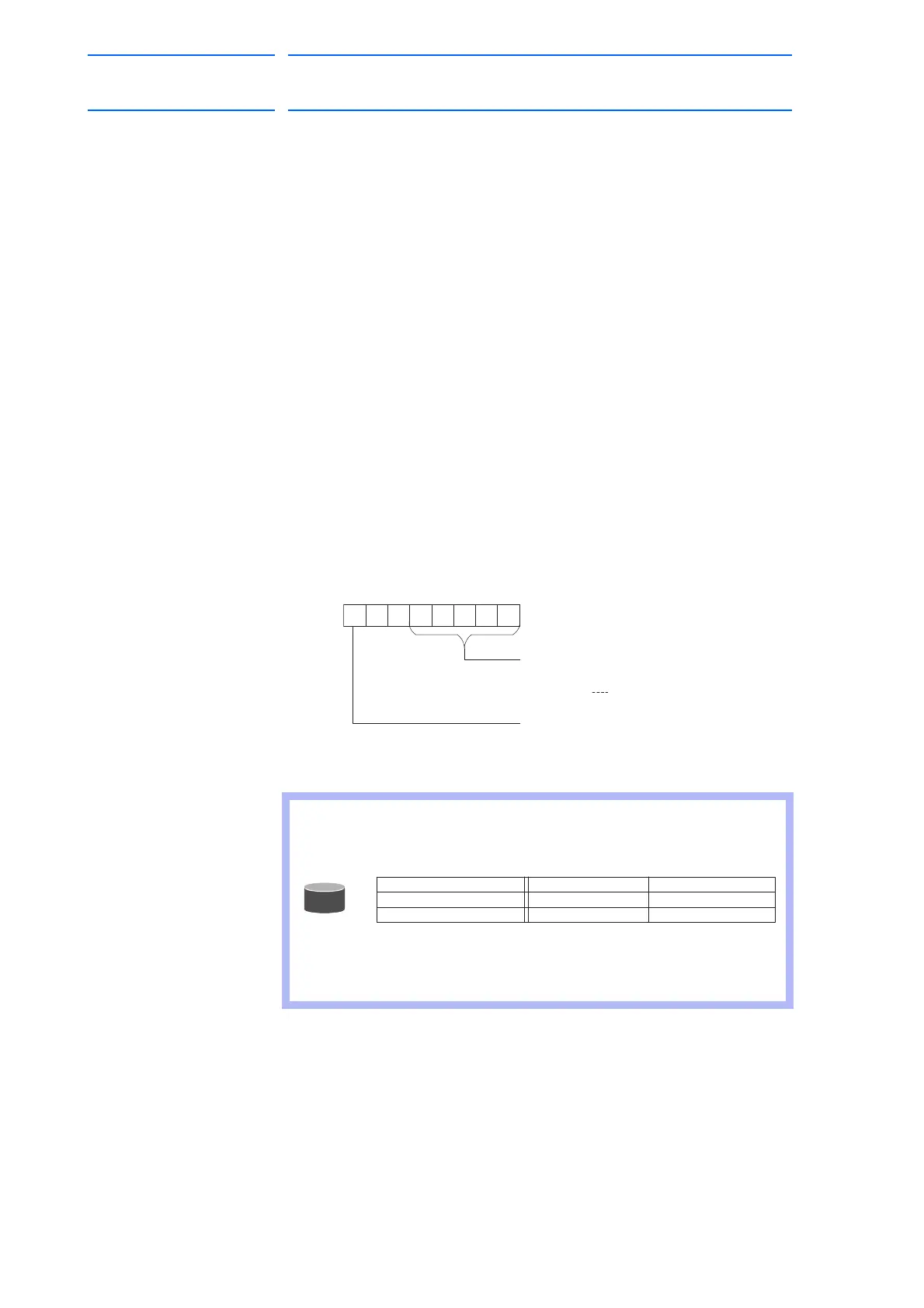
1. Designation of checking
These parameters specify the cube/axis interference to be used by bit.
2. Checking method
Designates whether checking is performed by command or feedback.
0 : Cube Interference/Axis Interference Not
Used
1 : Robot 1
2 : Robot 2
......
8 : Robot 8
9 : Base Axis 1
10 : Base Axis 2
......
16 : Base Axis 8
17 : Station Axis 1
18 : Station Axis 2
......
40 : Station Axis 24
Checking method
The checking method differs according to ON/OFF status of
servo power supply.
During the servo float function operation, checking is
performed by feedback regardless of the checking method
designation.
Designation of checking (data setting)
0: Not used
1: Robot 1, , 40: Station axis 24
Checking method (bit setting)
0: Command, 1: Feedback
Checking Method Designation
Servo Power Supply ON
Servo Power Supply OFF
Command
Feedback
Command
Feedback
Feedback
Feedback

 Loading...
Loading...









