3-86
155507-1CD
RE-CSO-A037
DX100
3 Teaching
3.9 Other Job-editing Functions
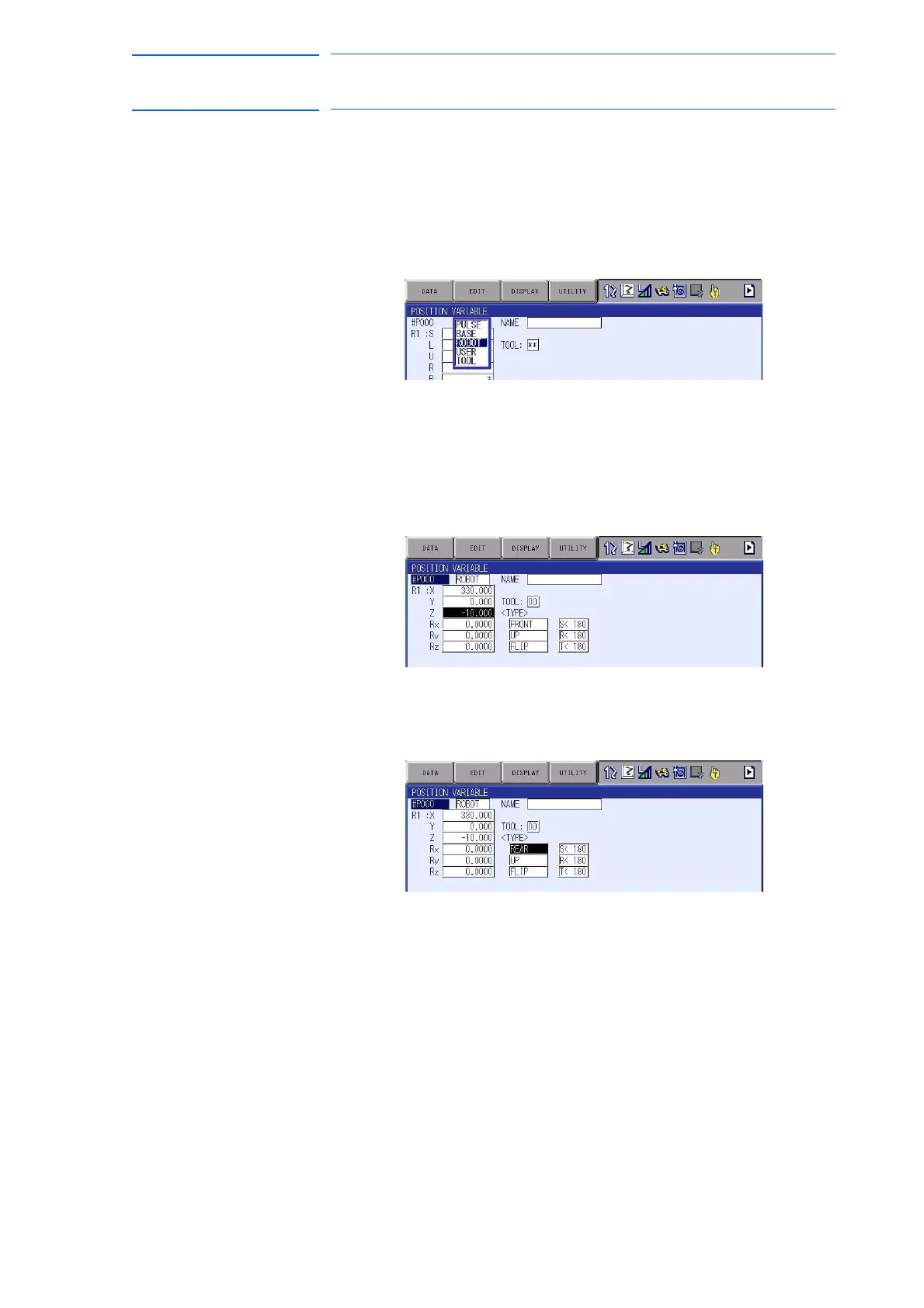
XYZ Type
1. Select {VARIABLE} under the main menu.
2. Select desired position variable type.
3. Select the variable data type.
– The selection dialog box appears.
4. Select desired coordinates except PULSE.
5. Move the cursor to desired data to be input and press [SELECT].
6. Input the value.
7. Press [ENTER].
– The value is set in the cursor position.
(1) Setting of “<TYPE>”
– Each time [SELECT] is pressed when the cursor is on the setting
data in the input buffer line, the settings alternate.
About “<TYPE>”
• It is not necessary to set a type if the position variable is to be used
for parallel shift operations.
• When the position variable is used with a move instruction such as
“MOVJ P001”, it is necessary to set a type. For details on types,
refer to section 3.9.4.10 “Manipulator Types” on page 3-89.
Current Position Window (XYZ) shows the current setting of a type.

 Loading...
Loading...









