6-125
155507-1CD
RE-CSO-A037
DX100
6 Convenient Functions
6.13 Present Manipulator Position Output Function
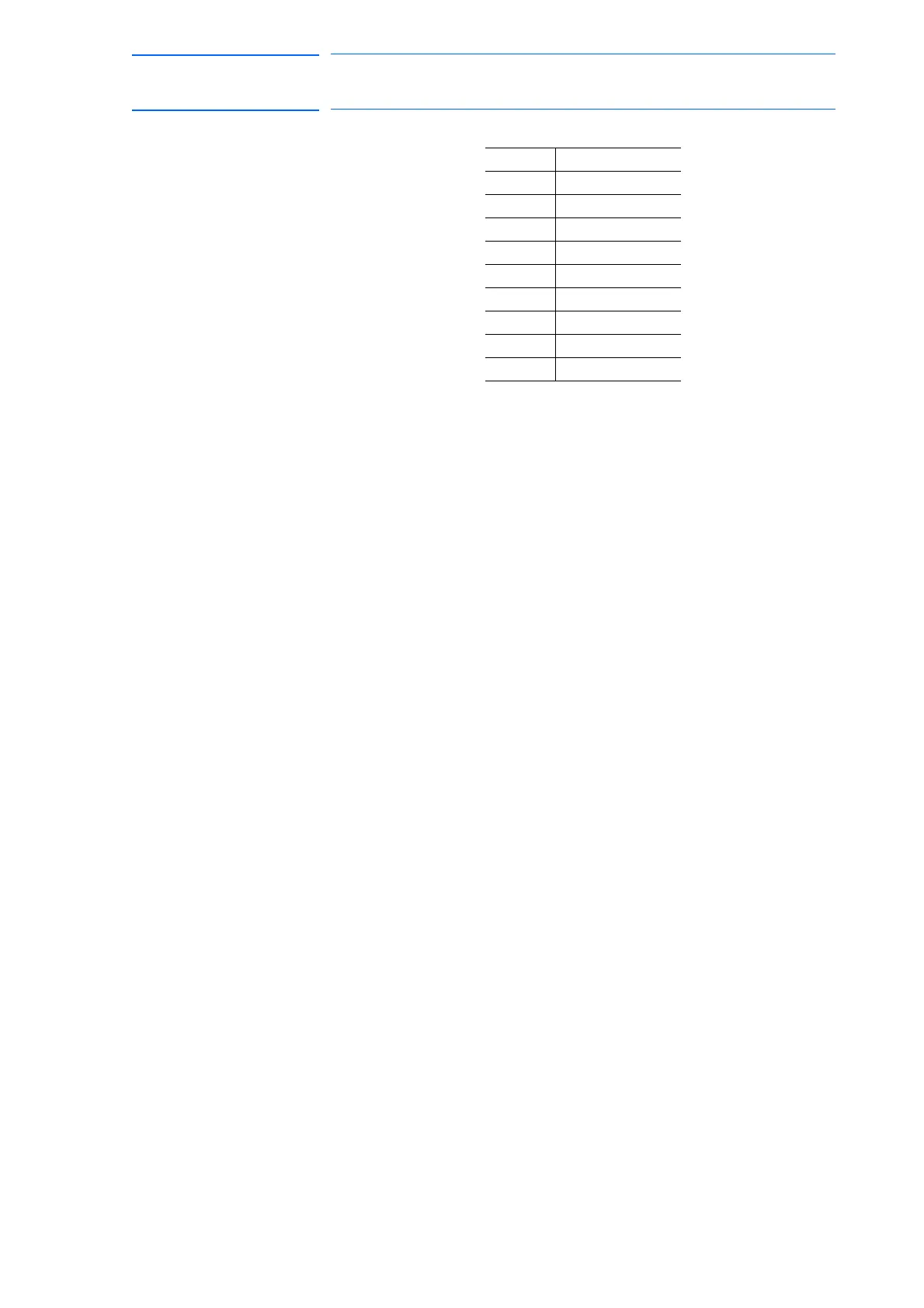
(Example 2)
When setting the parameter as above, the manipulator’s present cartesian
position is output to the registers as follows
S1C1G Setting value
217 1
218 1
219 10
220 12
221 14
222 16
223 18
224 20
225 22
M010= Lower 2 bytes of the manipulator’s present cartesian position (FB value) X [unit: µmm]
M011= Upper 2 bytes of the manipulator’s present cartesian position (FB value) X [unit:
µmm]
M012= Lower 2 bytes of the manipulator’s present cartesian position (FB value) Y [unit:
µmm]
M013= Upper 2 bytes of the manipulator’s present cartesian position (FB value) Y [unit:
µmm]
M014= Lower 2 bytes of the manipulator’s present cartesian position (FB value) Z [unit:
µmm]
M015= Upper 2 bytes of the manipulator’s present cartesian position (FB value) Z [unit:
µmm]
M016= Lower 2 bytes of the manipulator’s present cartesian position (FB value) Rx [unit: 0.001deg]
M017= Upper 2 bytes of the manipulator’s present cartesian position (FB value) Rx [unit: 0.001deg]
M018= Lower 2 bytes of the manipulator’s present cartesian position (FB value) Ry [unit: 0.001deg]
M019= Upper 2 bytes of the manipulator’s present cartesian position (FB value) Ry [unit: 0.001deg]
M020= Lower 2 bytes of the manipulator’s present cartesian position (FB value) Rz [unit: 0.001deg]
M021= Upper 2 bytes of the manipulator’s present cartesian position (FB value) Rz [unit: 0.001deg]
M022= Lower 2 bytes of the manipulator’s present cartesian position (FB value) Re [unit: 0.001deg]
M023= Upper 2 bytes of the manipulator’s present cartesian position (FB value) Re [unit: 0.001deg]

 Loading...
Loading...









