8 Parameter
8.4 Parameters According to Interference Area
8-33
155507-1CD
RE-CSO-A037
DX100
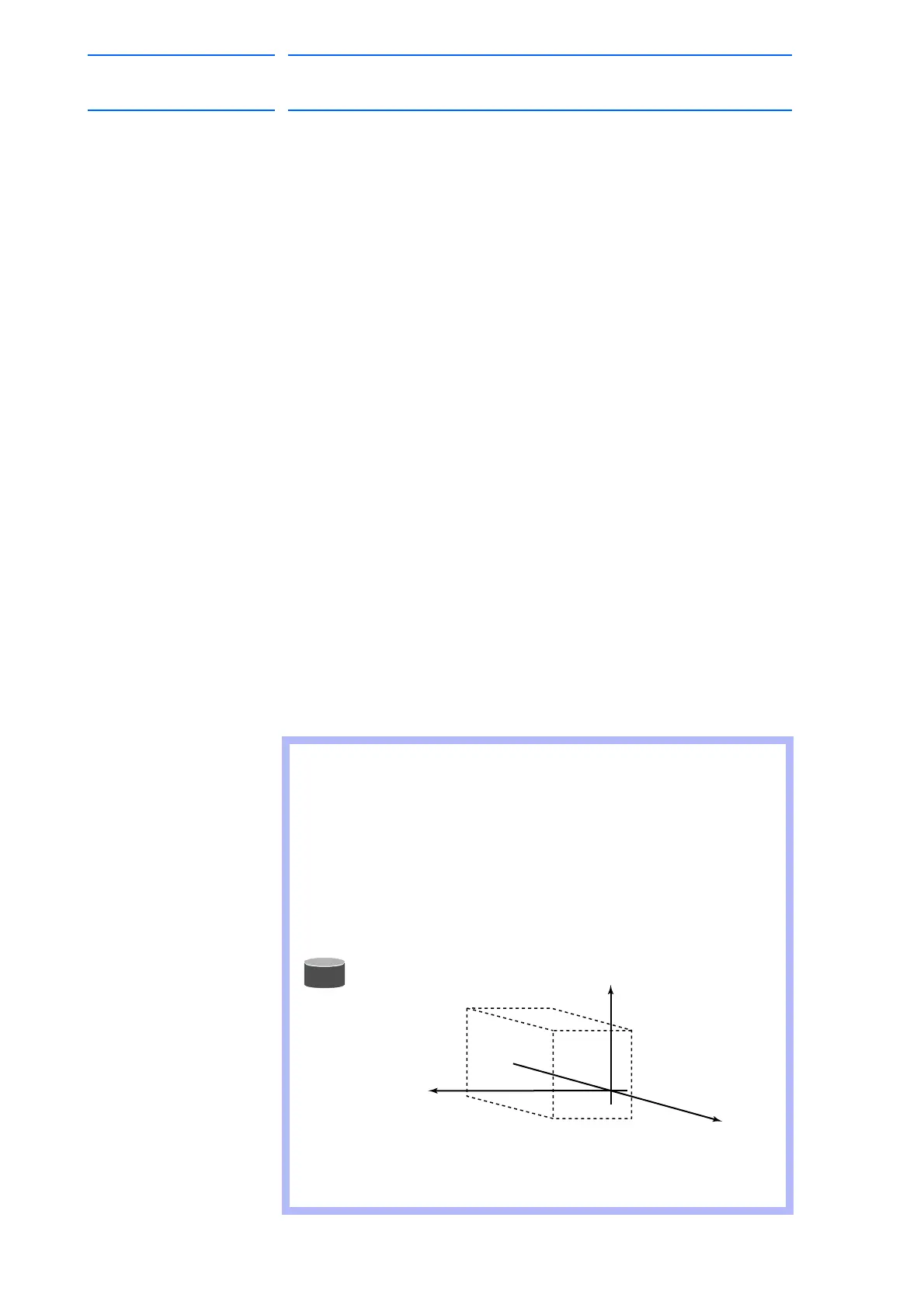
Cube Soft Limit (Base Coordinates of Robot TCP)
S3C000: Robot 1: + side: X
S3C001: Robot 1: + side: Y
S3C002: Robot 1: + side: Z
S3C003: Robot 1: - side: X
S3C004: Robot 1: - side: Y
S3C005: Robot 1: - side: Z
S3C007: Robot 2: + side: X
S3C008: Robot 2: + side: Y
S3C009: Robot 2: + side: Z
S3C010: Robot 2: - side: X
S3C011: Robot 2: - side: Y
S3C012: Robot 2: - side: Z
•
•
•
S3C042: Robot 8: + side: X
S3C043: Robot 8: + side: Y
S3C044: Robot 8: + side: Z
S3C045: Robot 8: - side: X
S3C046: Robot 8: - side: Y
S3C047: Robot 8: - side: Z
Soft Limit
Soft limit is a software-type function to limit the range of
movement of the manipulator.
If the TCP reaches the soft limit during operation, the
manipulator automatically stops and no longer moves in that
same direction. An alarm occurs if this soft limit is exceeded
during playback. This soft limit is classified into two types.
• Cube Soft Limit
Soft limit is set with the absolute value on the base
coordinates.
• Pulse Soft Limit (Independent Axis Soft Limit)
Refer to section 8.4.0.1 “S1CxG400 to S1CxG415: PULSE
SOFT LIMIT” on page 8-32.

 Loading...
Loading...









