Scan Recipes - Feature Find KLA-Tencor P-16+ / P-6 User’s Guide
3-86 KLA-Tencor Confidential 0142530-000 AB
3/13/09
Search For: Trench / Line 3
Trench / Line feature definition is for features that have dimensions in the x
direction only, such as the features shown inFigure 3.69, Trench / Line
Features. When performing the Feature Find scan, it first performs an x
direction scan trace. At the end of the trace, it analyzes the data to see if any
features in the scan meet the defined requirements, which are discussed in
detail later in the chapter. If a feature is not found, the stage is stepped in the y
direction by the specified amount and another x scan is performed. This
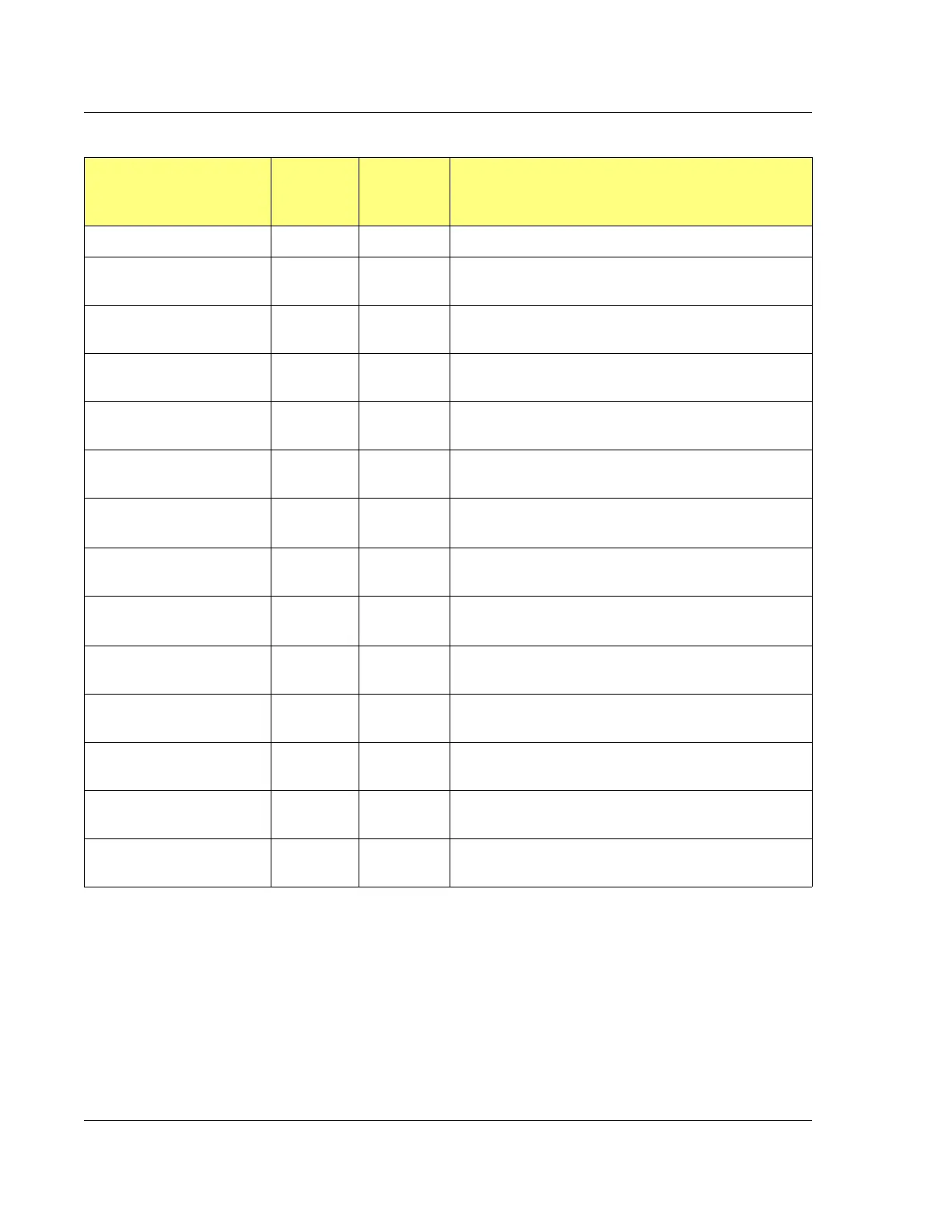
X Scan Size (μm) Both All X direction scan size of the feature find scan
Traces Both All This is the maximum number of x direction scans
performed during the x portion of the search.
Y-Spacing (μm) Both All This is the distance between x direction scans
performed during the x portion of the search.
Scan Speed (μm/s) Both All The speed at which the x direction scans are
performed.
Sampling Rate (Hz) Both All The rate at which data points on the scan are recorded
for analysis.
Failure Option Both All Action taken if the Feature Find scan fails to find a
feature.
Scan-Offset from Center
(μm)
Both All After a feature is found, these offsets are added to the
found offsets, shifting the measurement scan location.
Feature Characters Both Oval and
Trench
Defines the feature as above (line) or below (trench)
the sample surface.
Feature Depth/Height
(nm)
Both Oval and
Trench
Defines the minimum and maximum feature heights
that will be accepted as the defined feature.
X width (μm) Both Oval and
Trench
Defines the minimum and maximum feature x length
that will be accepted as the defined feature.
Model Both Model The model is a saved 3D scan that is used to locate the
same feature during the Feature Find scan.
Matching Methods Both Model Defines what pattern recognition algorithm will be used
to match scan data with the model.
Matching Scores Both Model Defines the minimum and maximum pattern recognition
score that will be accepted as the defined feature.
Reference Point (μm) Both Model Defines a point within the model that will be the center
of the measurement scan.
Table 3.27 Feature Find Recipe Parameters (Continued)
Parameter Setting Sensor or
Sample
Oval,
Trench or
Model
Description
 Loading...
Loading...